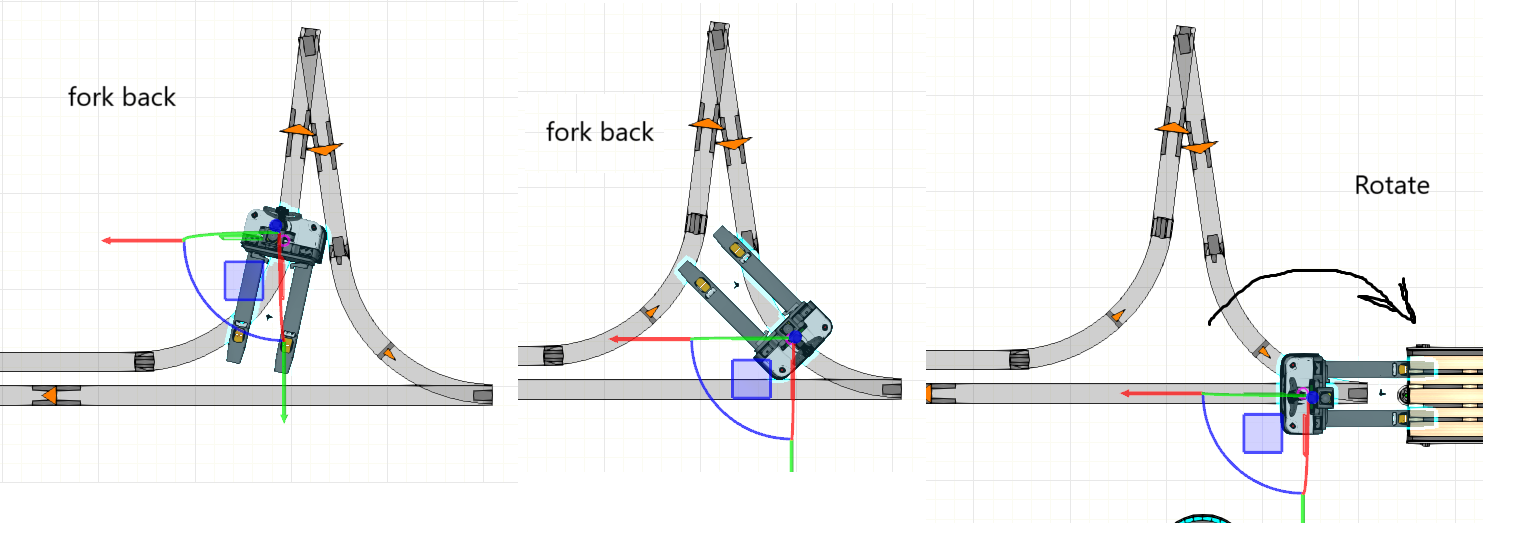
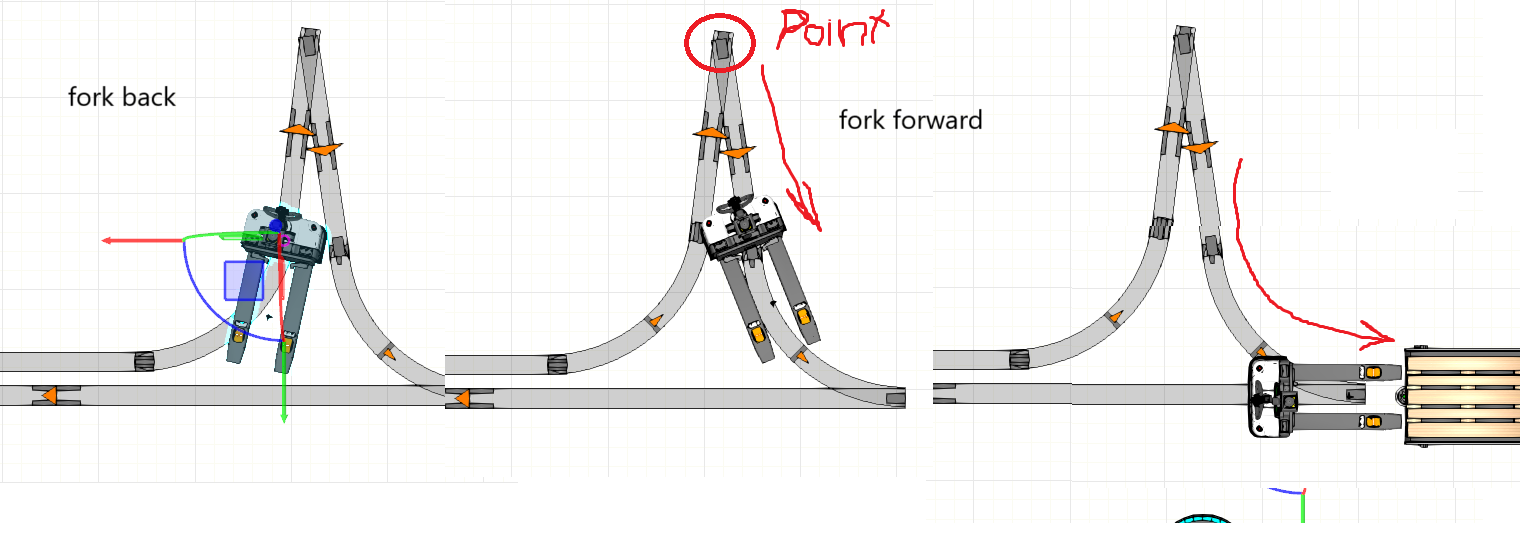
How can I change the orientation of the robot so that it does not turn in place in front of the conveyor, but turns around at the point I need. Now the robot is pitchforking backwards along the entire trajectory of the path, and at the point in front of the conveyor it begins to turn around in place. Such kinematics is not relevant for many forklifts. How can this be changed?