I import the plate component from SolidWorks, then explode it, add the top plate as a Link with translational DOF, then use the wizard to make the top plate a Positioner and connect it to a robot, so before the robot picking up the cup on the plate, the plate can slide toward the robot, and after robot putting the cup back onto the plate, the plate will slide out the other side.
Now my problem is, after robot putting the cup back onto the plate, the cup instead of moving with the plate, just stays still.
I have attached the cup to the plate, so the cup will move with plate, but seems like it detached after robot picking it up and put it back.
Can someone help me with it? What do I need to do?
Surprised to see VC 4.1. If the cup is not moving it is probably attached to something else.
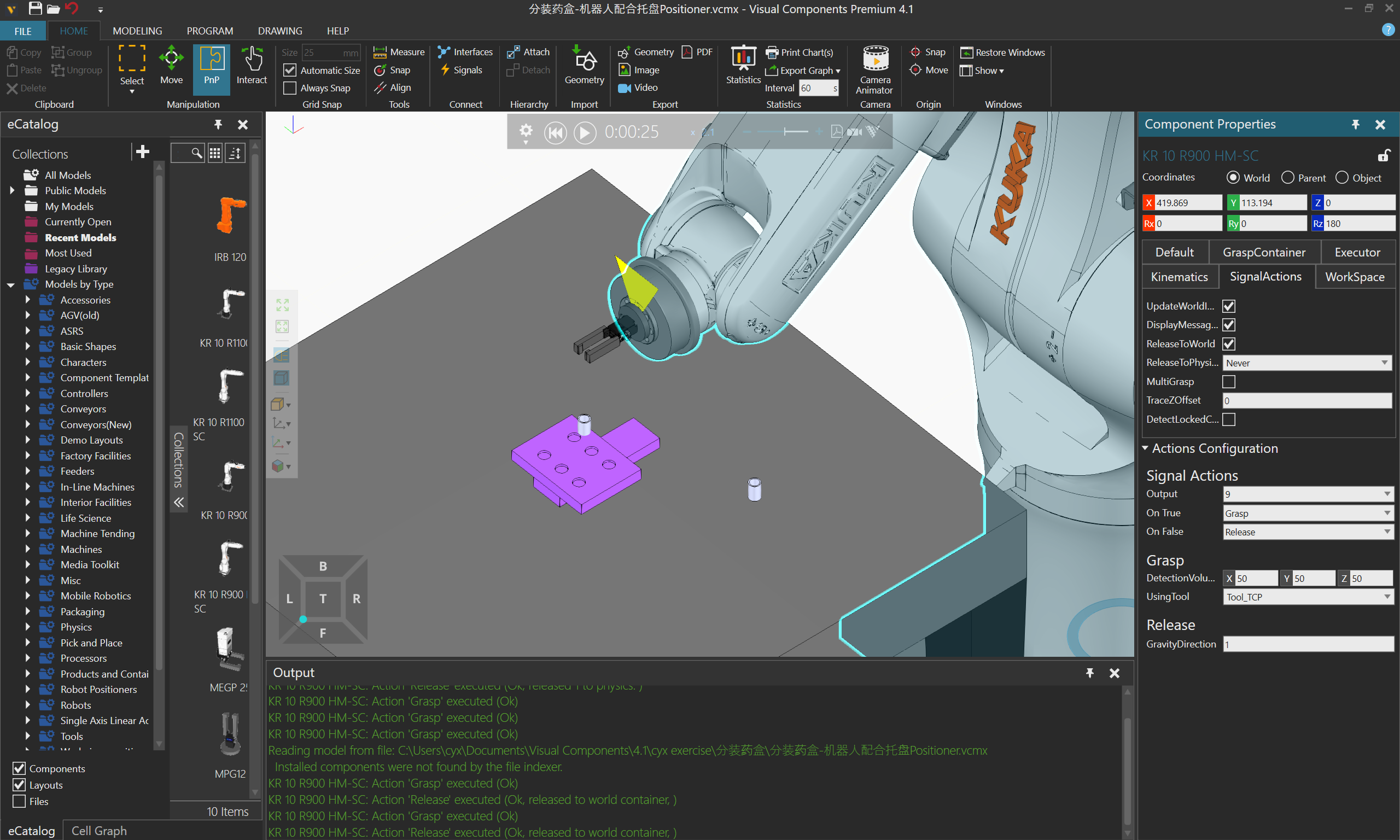
Select the robot as component.
In the Component Properties panel, look for a tab labeled “Signal Actions”, and then turn on Messages. This will print what the part is attached to in the Output panel during simulation.
Expand the Actions Configuration section, and then select Output 9, which is the output port you are using in your robot program.
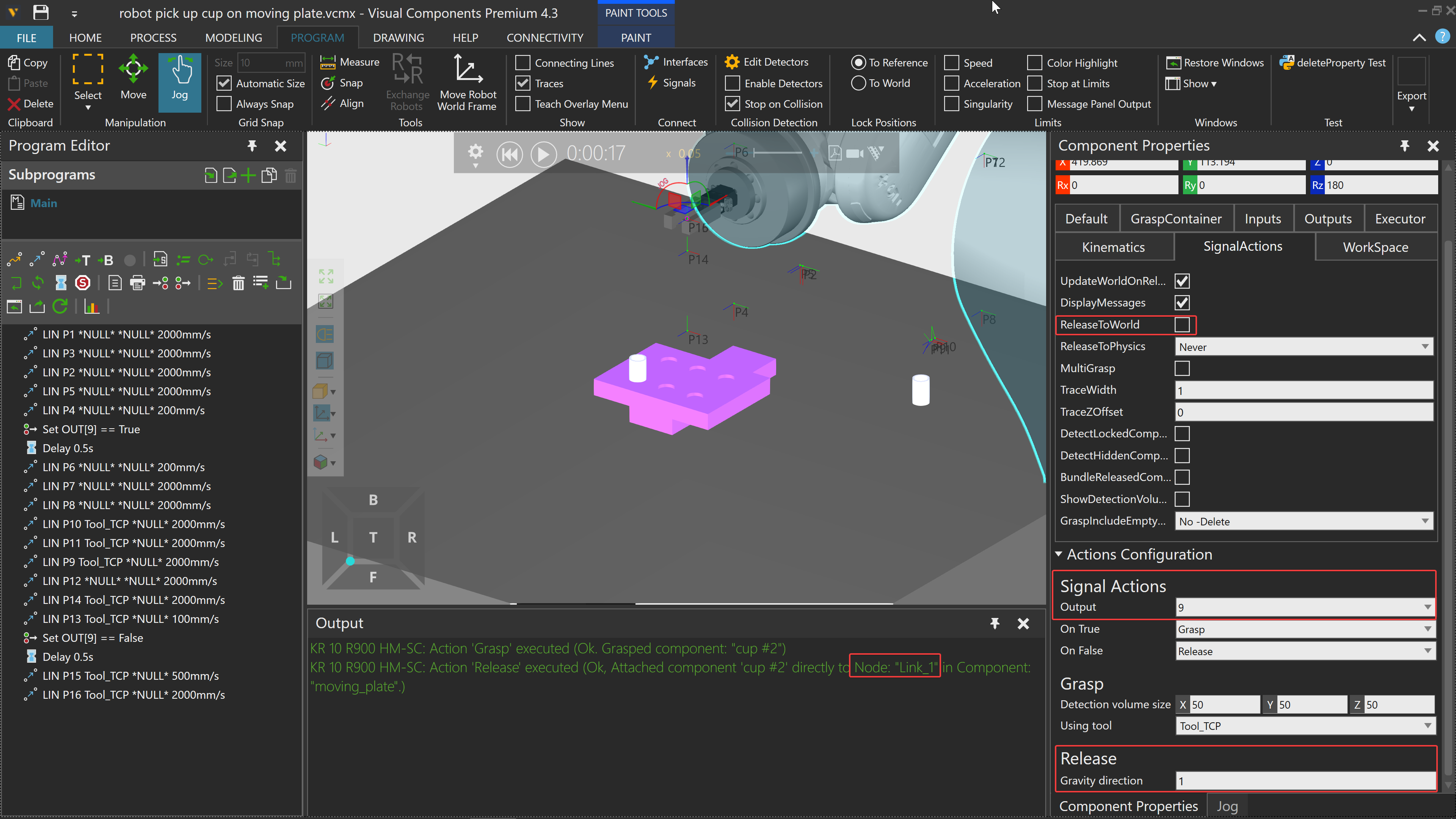
In the Signal Action for Output 9, I would expect you are doing Grasp and Release actions, so for the Release action make the Gravity 1mm or lower to ensure the cup is released and attached to the correct link/node. Based on what you wrote, sounds like the cup is being attached to table or root node of your mechanism, which is why it does not move with the joint.
Thanks for helping!
Yes, the robot release the cup to the “world container” as in the print info.
Setting release gravitydirection to 1 or 5 or 10 or even 0.5 / 0.1 does not make the cup attach to the plate.
I checked the tutorial video How to use Gravity Direction - YouTube it works for putting component on the moving pallet not the conveyor. So I’m confused.