Hi all,
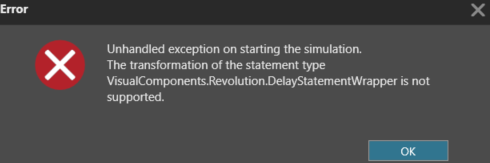
I’m a python newbie using KUKA Sim 4.3. I am following the Visual Components tutorials and when using the following code to add statements through python to the main routine I get the following error (for the VC_STATEMENT_DELAY for example):
The transformation of the statement type VisualComponents.Revolution.DelayStatementWrapper is not supported.
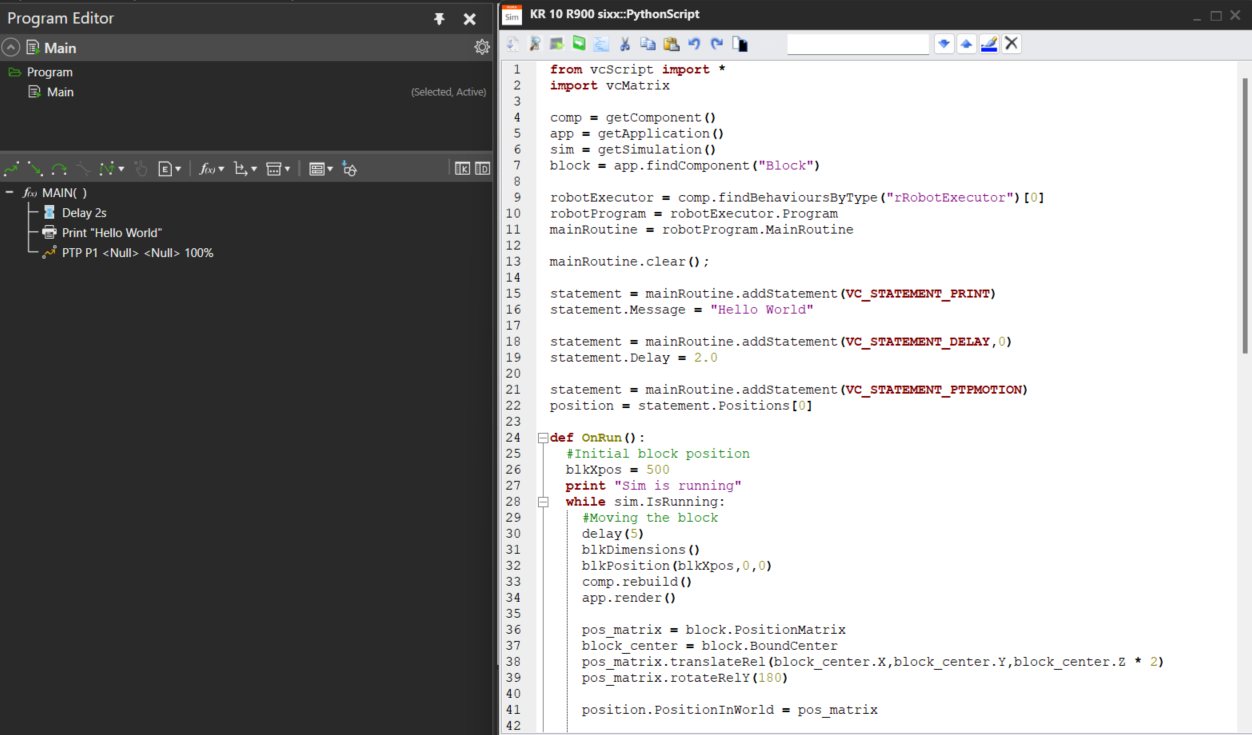
This error only pops up when I press the run simulation button. When I compile the code in the python script the delay, print statement, and PTP motion are actually created on the programme editor window. Below I add an image of the code and the successful compile.
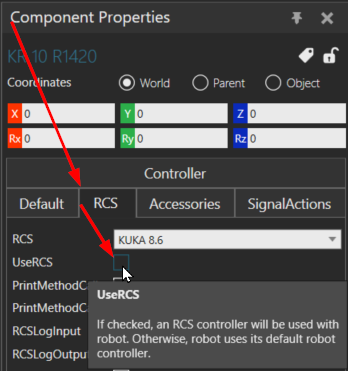
Unlike the tutorials, I am using a KUKA robot (KR 10 R900) and not the generic VC robot. I was wondering if this happens because I can’t use these commands on KUKA robots or if there is some option or plugin I have to install/turn on to make this code line work? Or maybe I am missing an extra s
iCircular3Test.vcmx (924.1 KB)
tep to enable these wrappers for the robot model I am using during sim runtime?
I am also attaching the vcmx file for reference.
Any help or advice is appreciated.
Thanks in advance.
Best regards,
Aaron