Hello,
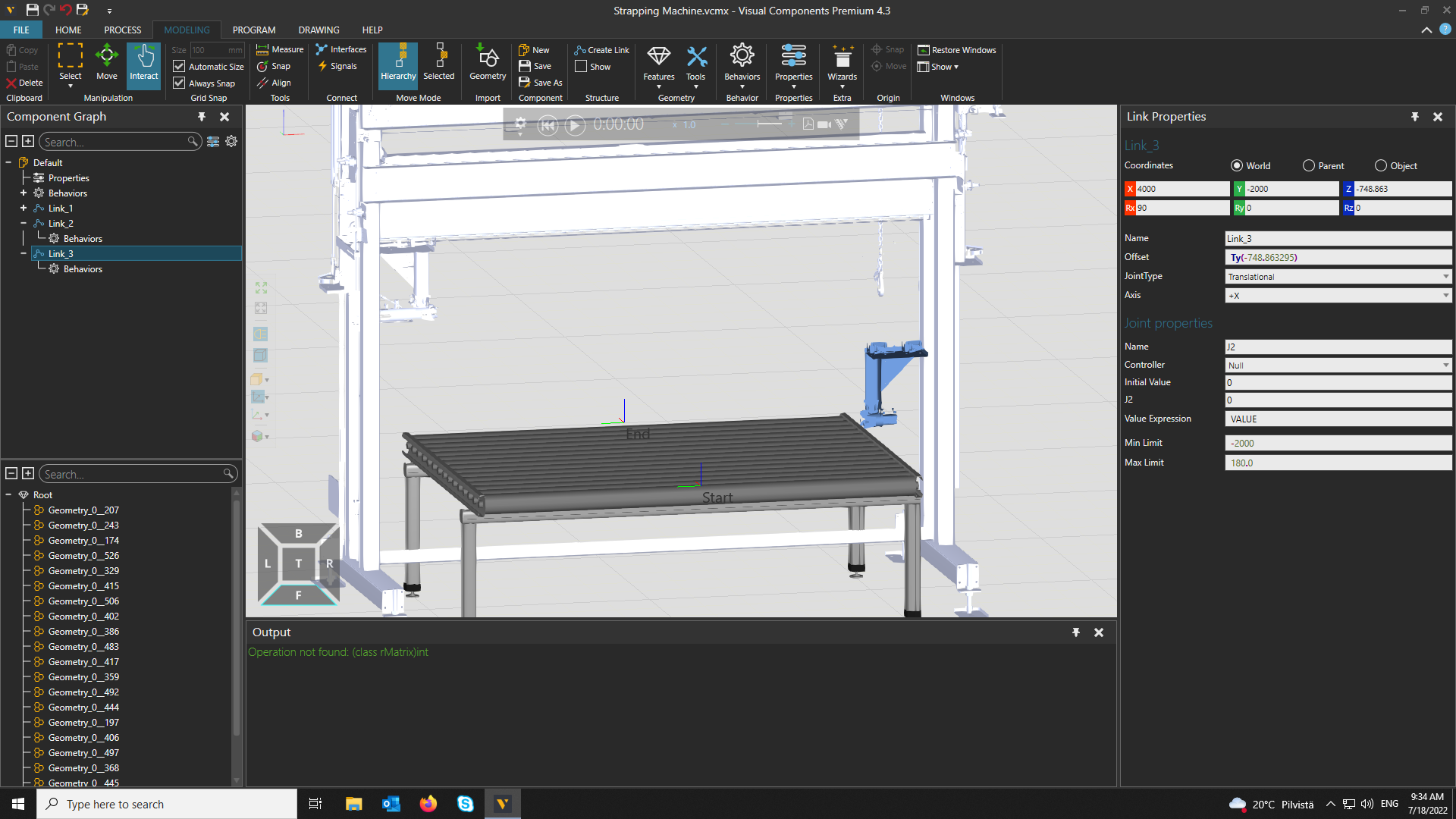
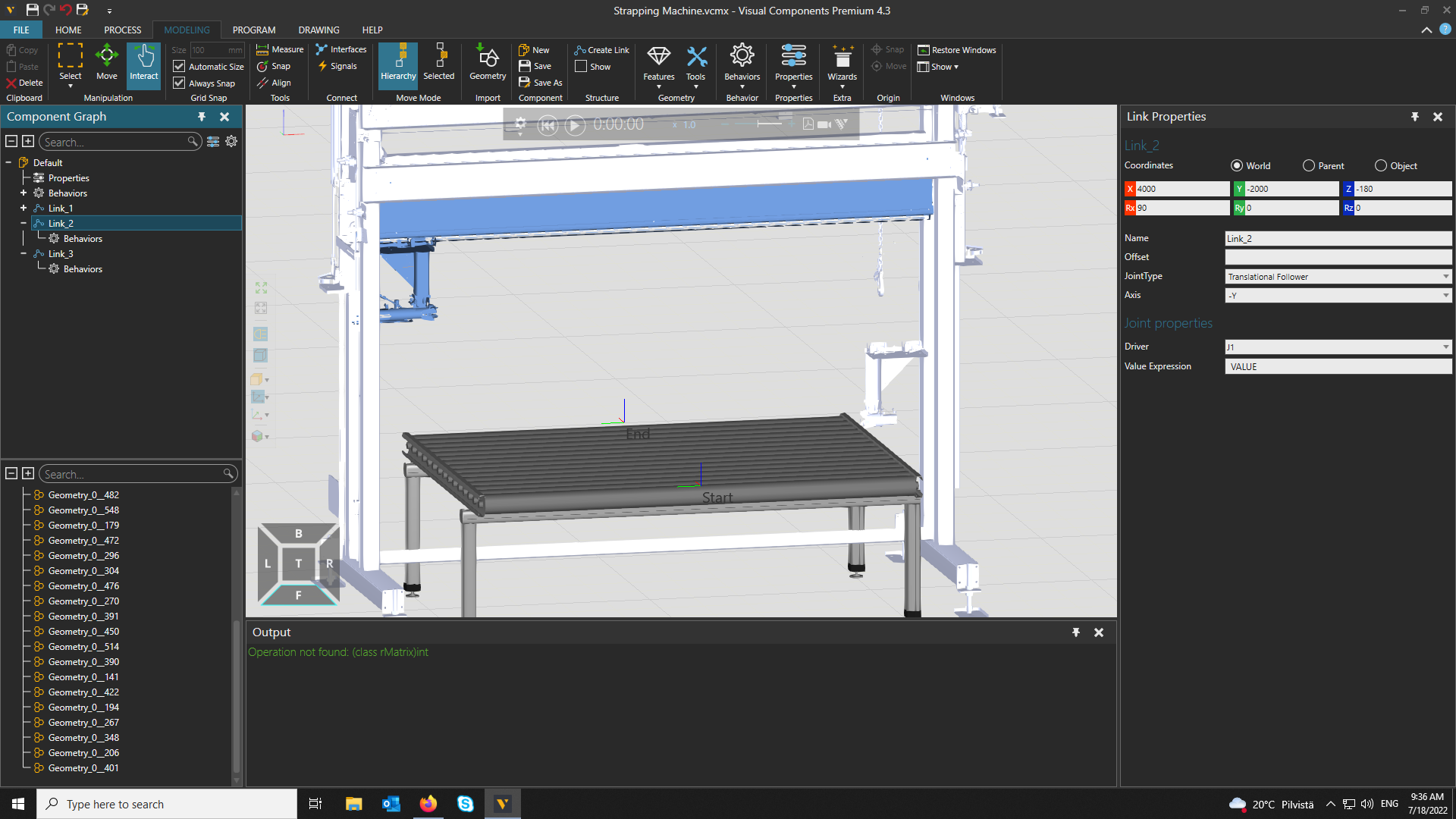
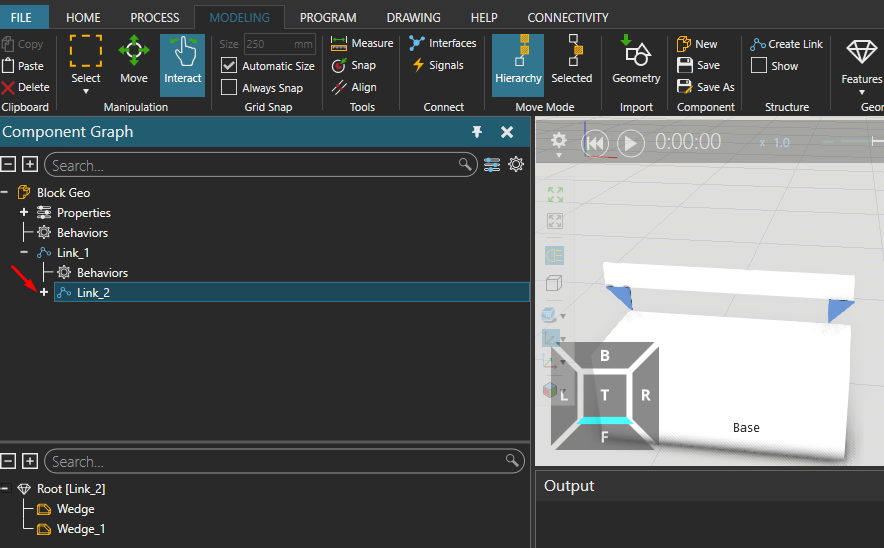
I am facing a problem when model Joint type for geometries in a machine. I do not know how can I add multiple joint types to a Link. As you can see in picture 1 below, I want to make it so that the highlighted link can both move down with highlighted in picture 2 and move horizontally. But it seems that this is not possible as the new joint type makes link in picture 1 completely separate from the machine. Are there any ways to fix this? I am quite confused as I am new to the application and this is needed for my project.
Thank you very much.