I am facing a problem when I added a tool with two links to the robot. one for rotation, another for picking.
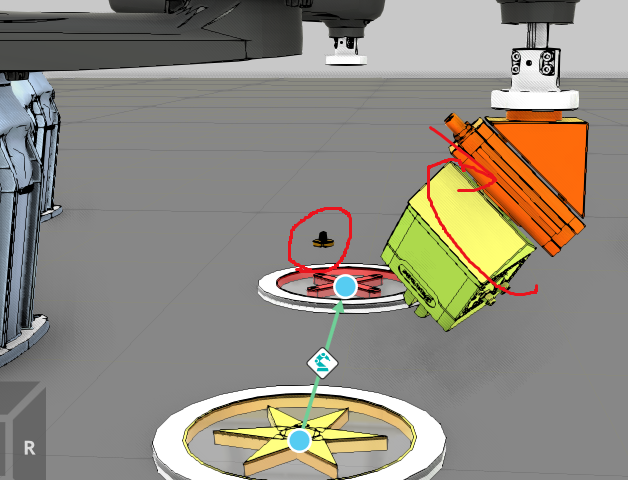
When the tool is rotated, the defined TCP does not move with it.
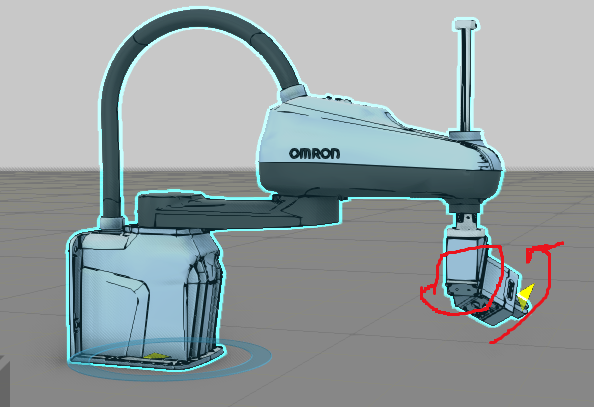
so I want to add a new extra link for the rotation to scara robot (in picture 1). I want to use pythonkinematics to define this 5-axis robot.
Can you provide relevant tutorials or examples? Or is there any other way to solve it? scara.vcmx (3.0 MB)
the tool need it’s own toolContainer where the tool is glued to the rigth node.
With an OneToOneInterface the robot gets the tcp of the connected tool!
as the picture shows,wenn tool is rotated, tcp does not move with it. the Item doesn’t follow rotation
how can i solve that problem? Like what I have done, I want to add a extra link to the robot
BTW, Can you provide relevant tutorials or examples? I want to learn, How to define a particular robot with python-kinematics.