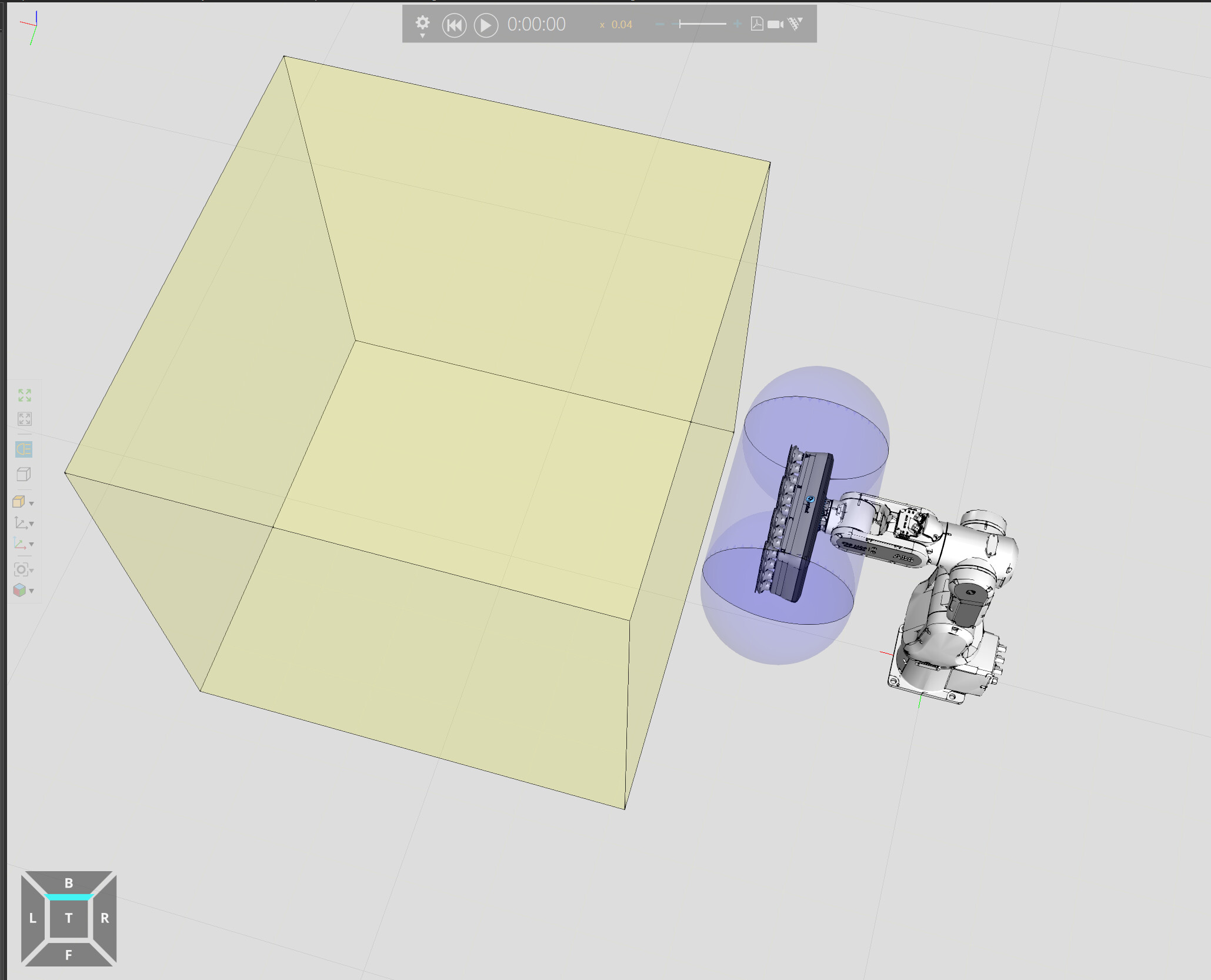
This is a question about the safe zone, which is often used in multi-robot workstations, such as body-in-white welding, and I wonder if there is a way to do this in the VC, when the part of the security area (blue part) enters the interaction area (yellow part) and reaches 3/4 of the part, it gets any signal or notification, is this possible?
Looking forward to hearing from anyone, thanks in advance!