I found a bug in the AMR detection area. What I know is:
-
At present, all AMRs of VC must move forward in the+X direction when moving from “PickAproach”, “PlaceApproach”, and “WorkApproach” to the target position (regardless of whether the user sets the AMR forward direction to+X or - X), which means that if using a forklift type, the forward direction must be set to - X;
-
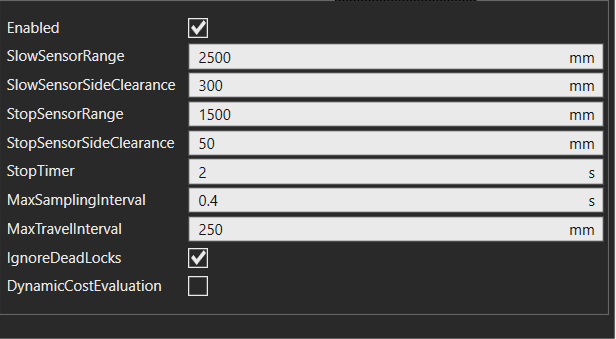
All the parameters related to setting the detection area (as shown in the picture below) are only for the+X direction. If the AMR moves forward in the - X direction, the AMR will only detect the area behind it during the forward process. This means that if the rear suddenly enters other AMRs, the front AMR will slow down and stop, but the rear AMR will directly collide with it (in other words, the AMR moves forward while detecting the area behind itself, making it impossible to recognize other AMRs in the forward direction and slow down and stop)