Visual Components 4.10 is out now. We continue updating 4.10 eCat and 4.9 eCat will be frozen.
Legacy Libraries
In 4.9 we started new convention where most of the old eCat versions (i.e. legacy libraries) are by default turned off. In 4.10 only the previous 4.9 legacy is enabled by default. Older libraries are listed on sources but you need to enable them if you want them to be indexed. Legacy libraries are needed if you need to open layouts which were saved without including components. In this case component geometries are fetched from eCat instead of layout file itself. So if you see missing geometries and VCID errors on the output console you can try to enable legacy libraries in order to have those old component versions be available. In 4.9 update post (4.9 eCat Updates) there is an example video showing how to enable legacy libraries. Do note that easiest way to migrate layouts from one platform to another is to save layouts with “Include Components” option enabled.
To open the reasoning why we have new eCat version with new major release is that having this kind of separation allows us to update components without fear that it would break something if the components are used in old app versions. If there’s some new component behavior added we can use it on eCat models knowing that this component is only used in new app version as using it in older platform would not work. Also we can update component geometries if needed in new eCat. Now we’ve updated some VC logos to match our refreshed brand and we can make these updates to geometries on new eCat without it breaking geometries of layouts in 4.9 which use these VC branded components.
Type changes
There have been some updates to eCat types. Before we used to have “PM” prefix on many categories indicating that those components were meant to be used with Process Modeling. Process Modeling feature has been out few years and it has matured enough that we feel it’s really at the core of building simulations. Therefore there’s no need to emphasize Process Modeling on eCat components and the default assumption is that every new model we make is easy to use with Process Modeling. As result we’ve dropped “PM” prefix on all types which had it. Changed categories are listed below:
- PM Cranes → Cranes
- PM Flow Components → Flow Components
- PM Mobile Robot Utilities → Mobile Robot Utilities
- PM Mobile Robots → Mobile Robots
- PM Navigation → Navigation
- PM Resources → Resources
- PM Tools → Resource Tools
- PM Transport Controllers → Transport Controllers
- PM Warehousing → Warehousing
Besides this we’ve also consolidated some industry specific types and dropped “Library” word on those types which had it:
- Life Science Library → Life Science
- Packaging Library → Packaging
Finally we’ve moved OLP demo layouts from “Layouts” to new type “Layouts OLP”. In general as we keep expanding eCat contents we try to come up with new types when it makes sense so that browsing the catalog would be easy.
Feeders
In the past we used to have separate feeders for Process Modeling and feeders that create components without PM products associated to them. We’ve now changed all feeders to create products and not just components. A product in VC simulation is a dynamic component with some process modeling information added to it. If you have use cases where you don’t need to use process modeling you can still use these new feeders the same way as before and having that extra layer of information on the dynamic components should not hinder your workflow in any way. Note that even if there are many feeders found under “Feeders” type we’ve also left few of the well-known PM feeders under “Flow Components” type as duplicates. Early feedback was that when you are building early layout drafts and flows is nice to have feeders, process nodes and sinks under this one type.
New Components
Here’s a list of components that has been added to 4.10 eCat specifically:
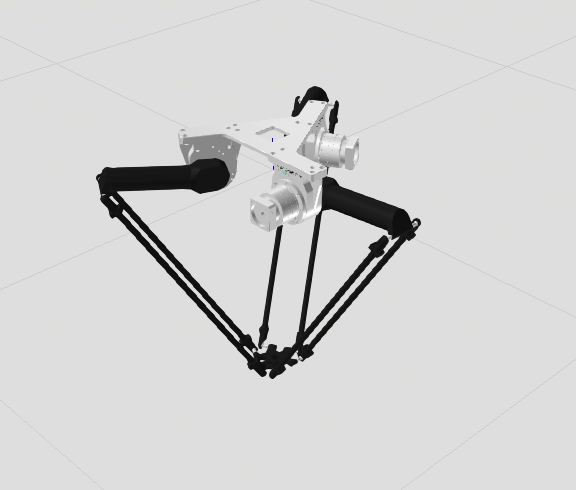
Autonox Robotics (Robots)
- DELTA RL3-900-3kg
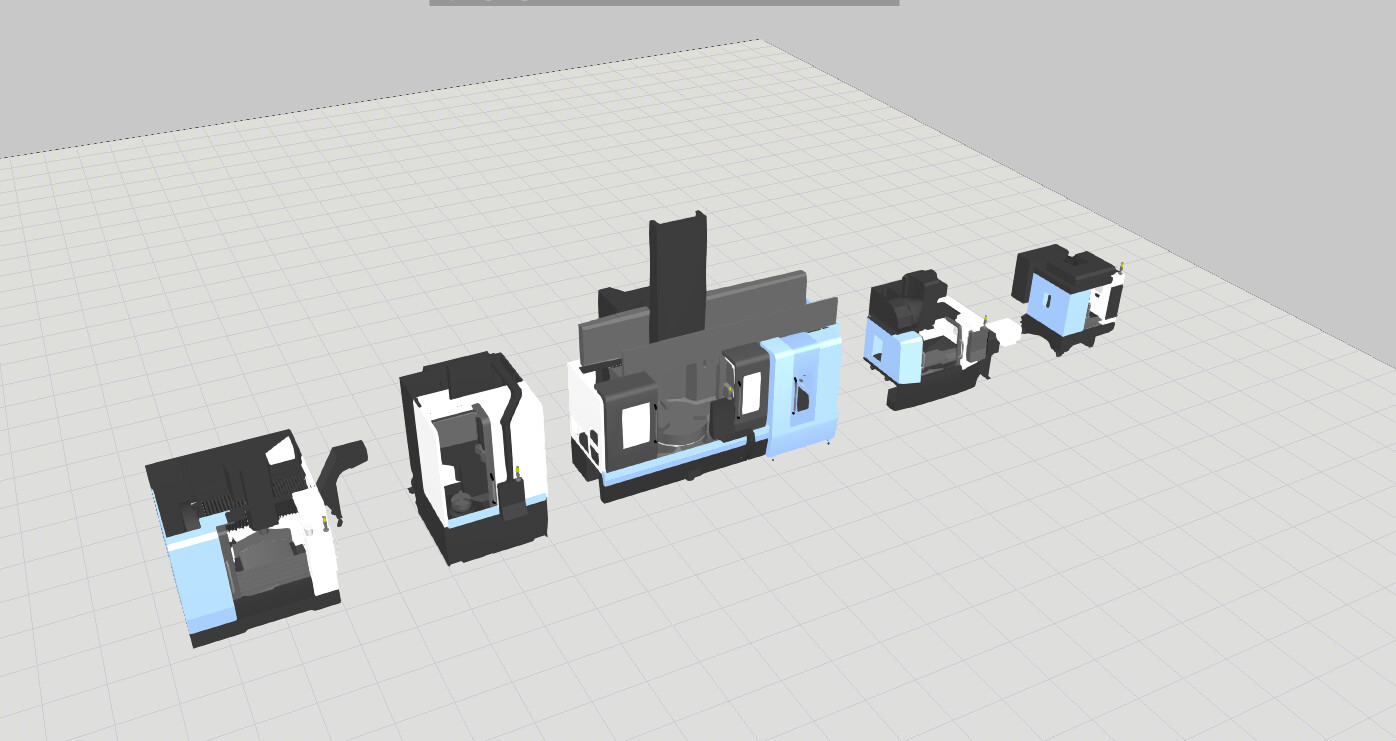
DN Solutions (Machines)
- BVM 5700
- Puma V8300R
- Puma VTR1216M
- SVM 4100
- T 4000
Fanuc (Robots)
- P-1000iA LH Metal Arm
- P-1000iA RH Metal Arm
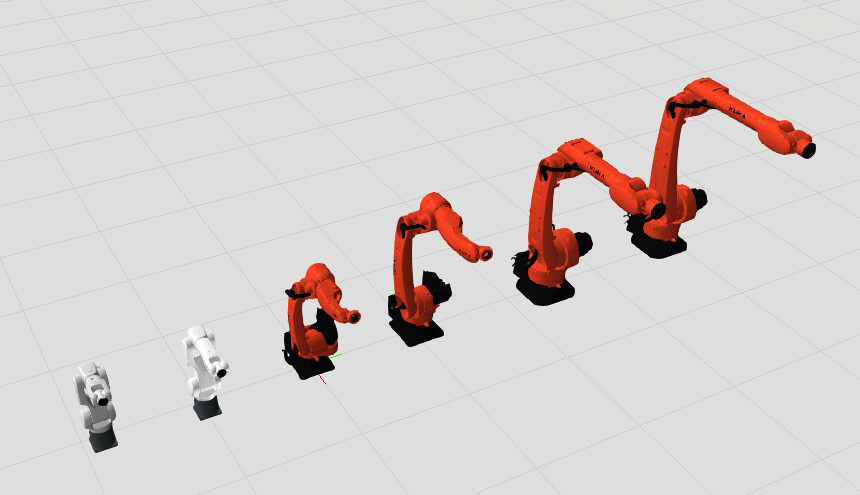
KUKA (Robots)
- KR 7 R700-3 E
- KR 7 R900-3 E
- KR 12 R1450-2 E
- KR 35 R1840-2 E
- KR 50 R2100 E
- KR 50 R2500 E
- KR 70 R2100 E
MABI Robotic AG (Robots, Robot Positioners & Robot Workpiece Positioners)
- MAX-100-2.25-P
- MAX-150-2.0-P
- MAX-200-2.5-P
- MLR-2500-P
- MMT-650-500-DD
- MMT-1330-500-GB
- MT-1400-6000-TPD
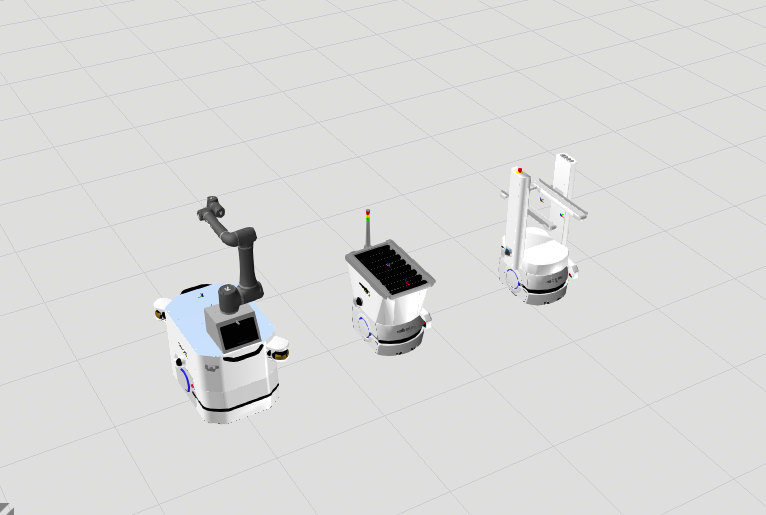
Robotec (Mobile Robots)
- R-MoMa
- SRX III
- SRX VIII
Schnaithmann (Conveyors)
- BS100
- BS11
- BS20
- BS21
- BS35
- BS55
- Lift Transverse Unit
- Vertical Lift Conveyor
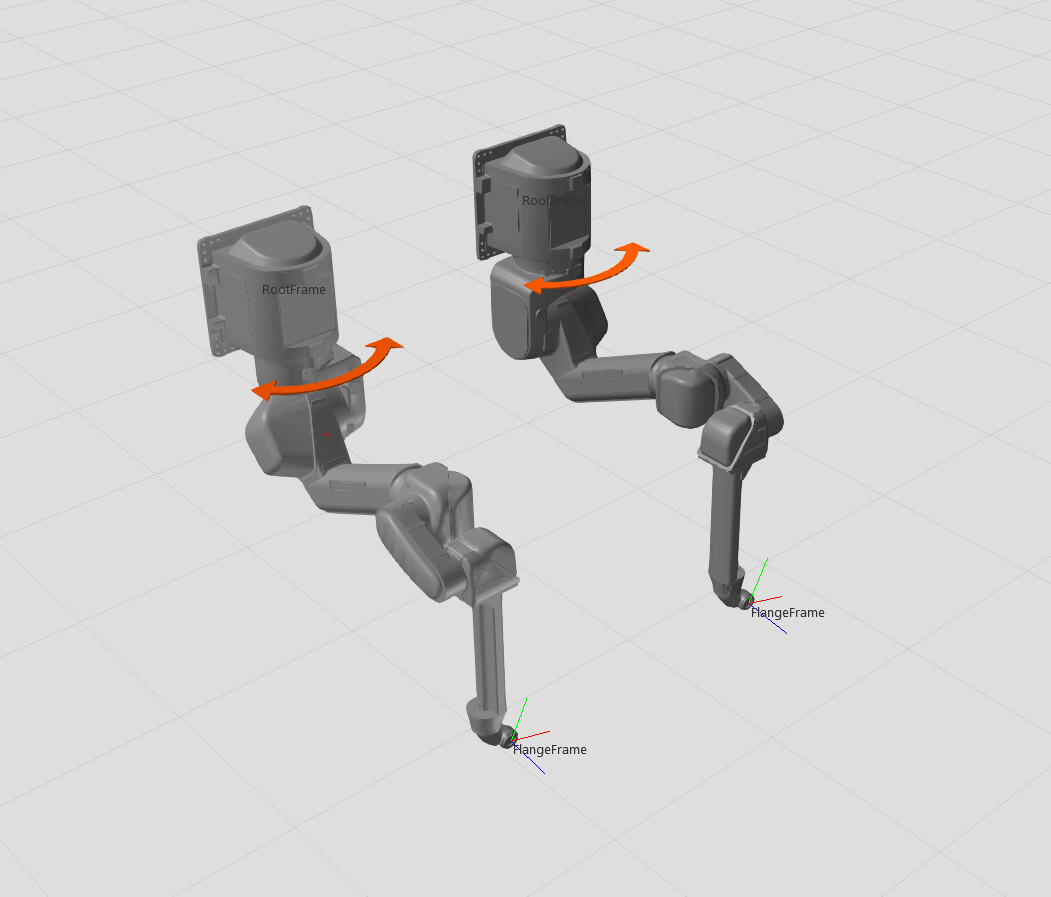
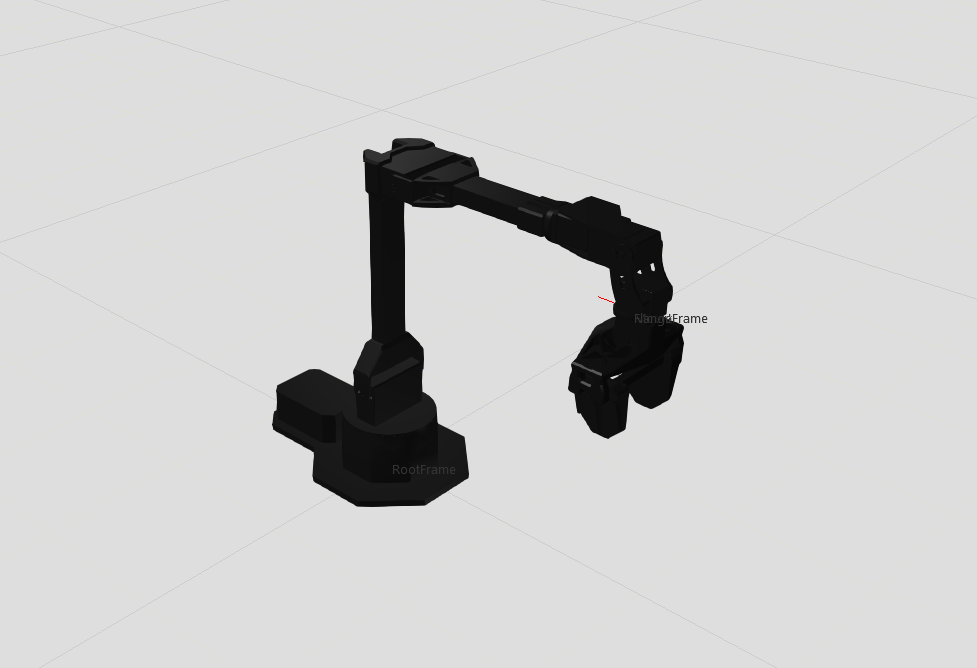
Trossen (Robots)
- ViperX 300 S
Visual Components
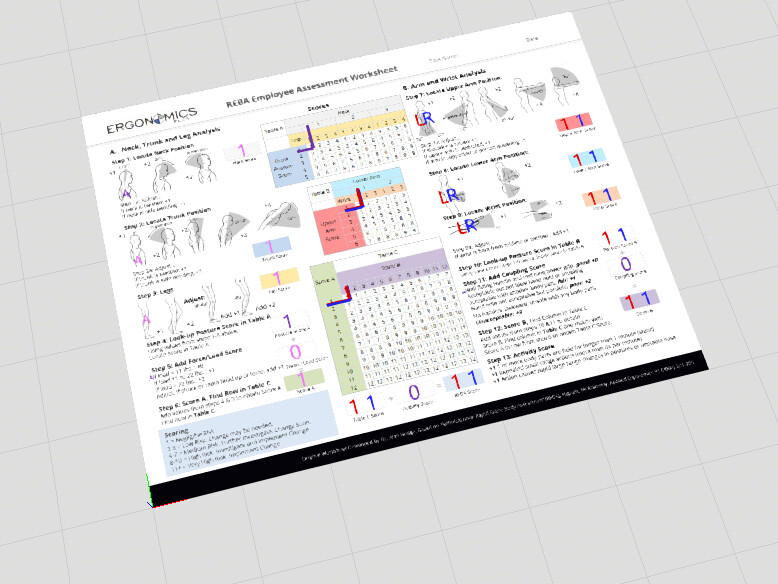
- Ergonomics REBA
More tools for human resource ergonomics. Found under “Resources” type.
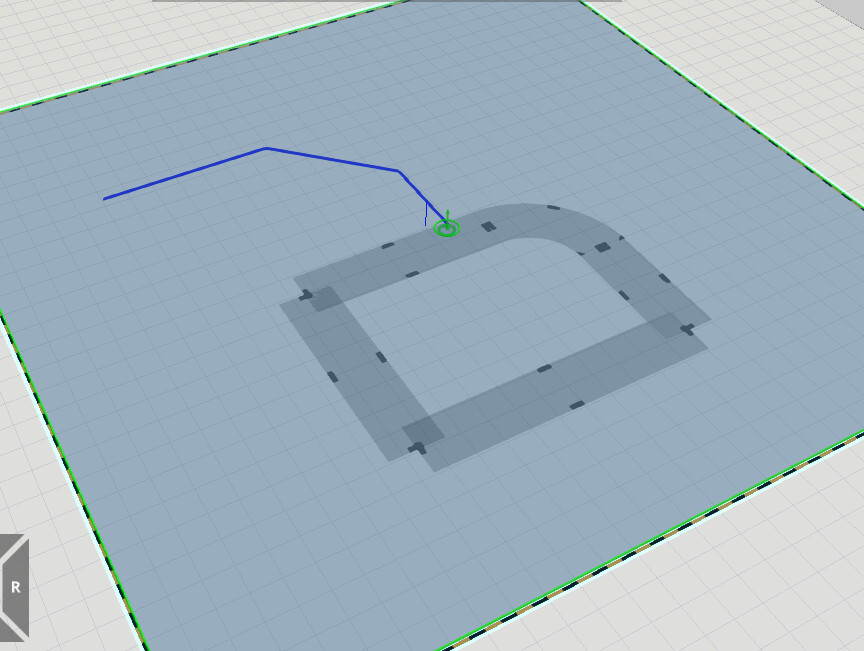
- Pathway Builder
You may know the fence builder component. Here’s similar tool for drawing pathways for MRs and human resources. Found under “Navigation” type.
- Sparking
Helper components to visualize arc/spot welding sparks. Found under “Robot Tools” type.
Resources
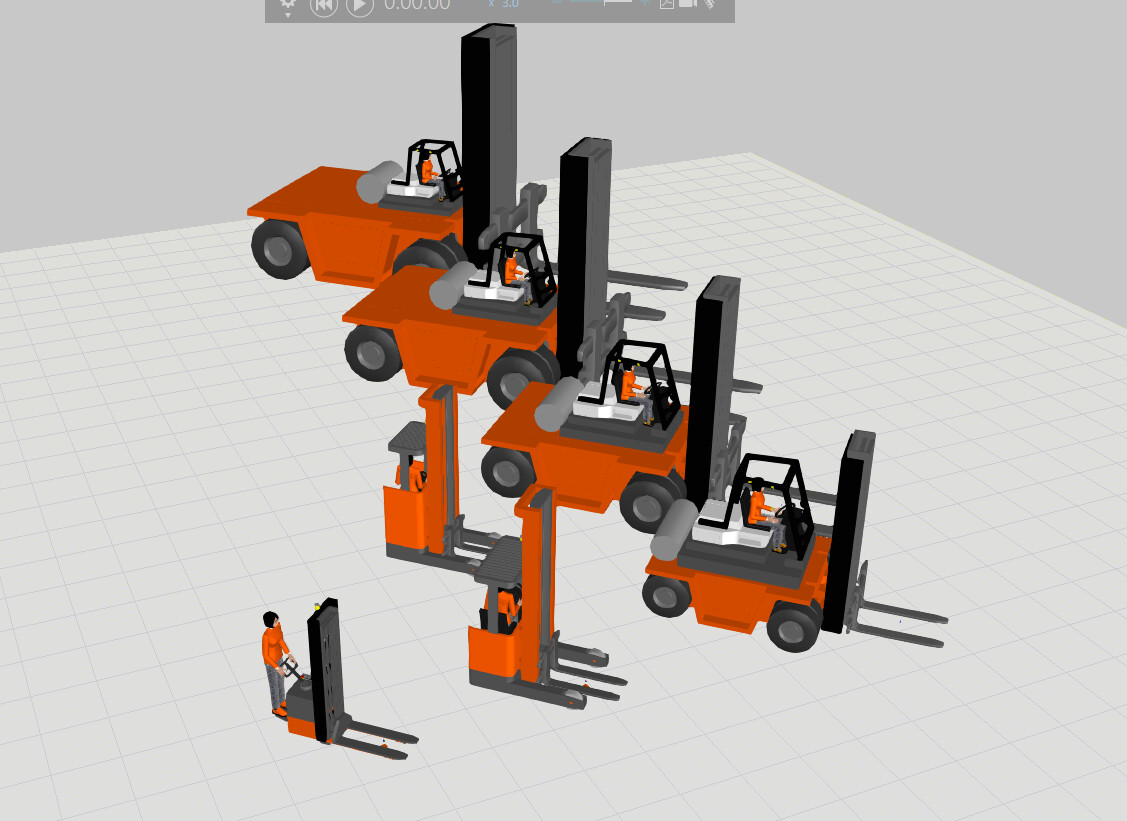
- Heavy Forklift Resource
- Reach Truck Resource
- StandOn Pallet Jack Resource
More resource components for making those transport tasks in layouts. Heavy forklift and reach truck has few different parameters for the looks. These are found under “Resources” type.
New Layouts
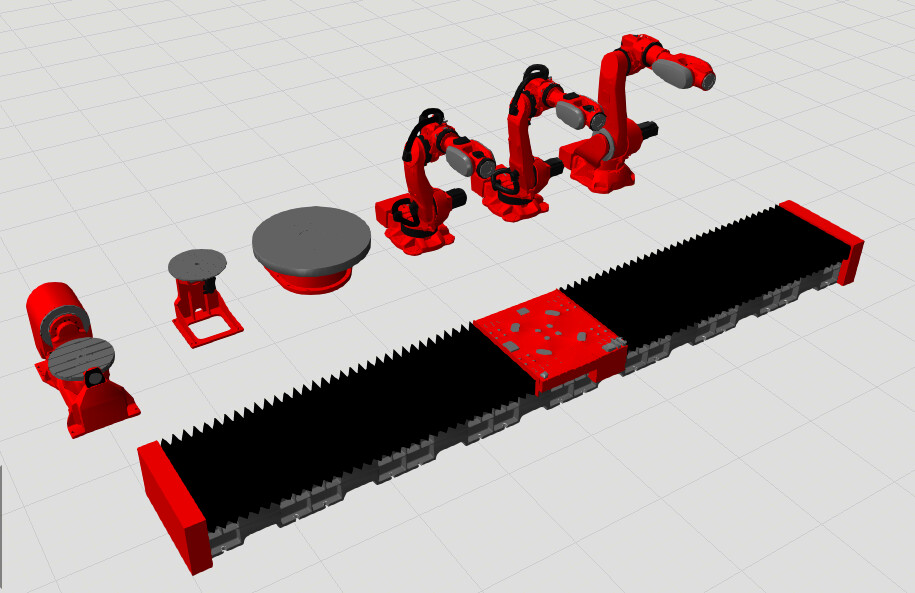
- AMR Thermal Spraying System
This layout has nice demonstration on how to use missions with mobile robots.

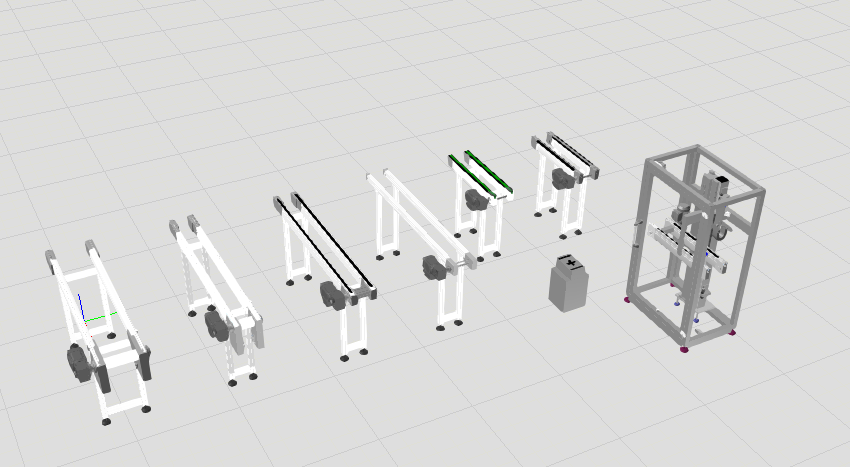
- Electronics Manufacturing System
This layout pushes the limits on how large layouts we are able to simulate at the moment.
Transport controller and resource updates
There have been few changes in transport controllers and resources to improve debugging. The following features have been implemented:
-
Option to stop the simulation in case any error or warning message is printed. New properties on TC:
- Messages::StopOnError
- Messages::StopOnWarning
-
Improved output messages to indicate the exact problem and propose solutions. New properties on TC and resources:
- Messages::PrintOutputs
- Messages::PrintSimTimes
- Messages::PrinErrors
- Messages::PrintWarnings
- Messages::PrintInfoMessages
- Messages::PrintDebugMessages
-
3D visualization of unsolved routes to indicate which route was not solved. New properties on TC:
- VisualizeUnsolvedRoutes
- VisualizeNotConnectedPathways
-
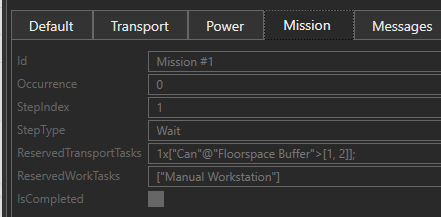
Mission mode visualization shows if TC works in normal or mission mode. For mission mode the appearance of component changes. TC has “MissionMode” property enabled along with some details about available tasks.

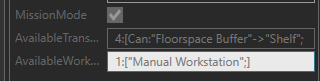
Resources also have “MissionMode” property and details about current mission on “Mission” tab.
These updates are available in version for the following transport controllers and their resources:
- Mobile Robot Transport Controller
- Vehicle Transport Controller
- Human Transport Controller
-k