Hello, i have a problem with a gripper from the e-catalog (PZN_plus_300_1). The Gripper is supposed to grab the spawned product at the center of geometry, but it just wont in my pm cycle. I dont want to create a new product type with custom origin coordinates as these are standard product types directly from the kastowin machine i am using in the next step. Is there a way to use this 3-finger-gripper? The process does work with the generic vacuum gripper from the e catalog.
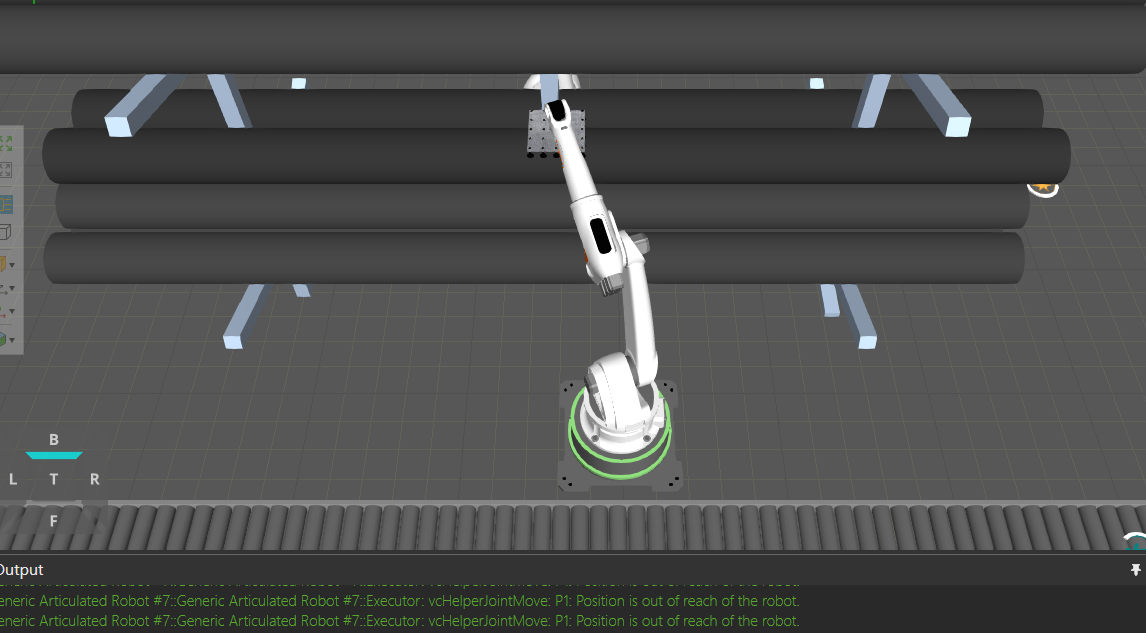
The Gripper i want to use (PZN_plus_300_1) :
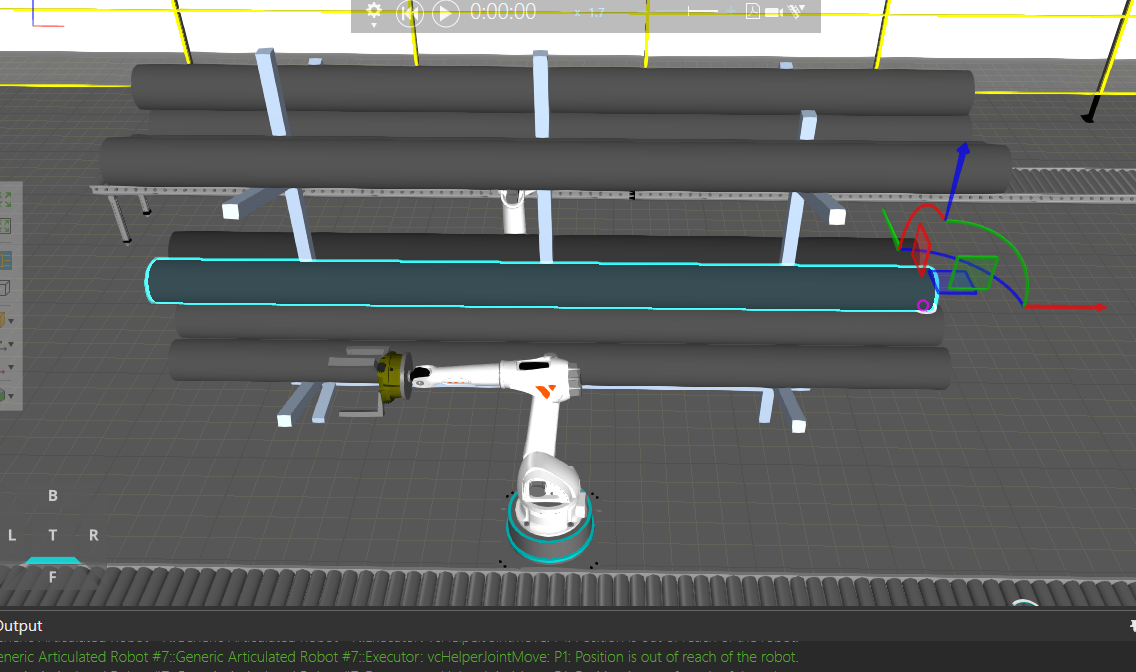
The Gripper which works fine :
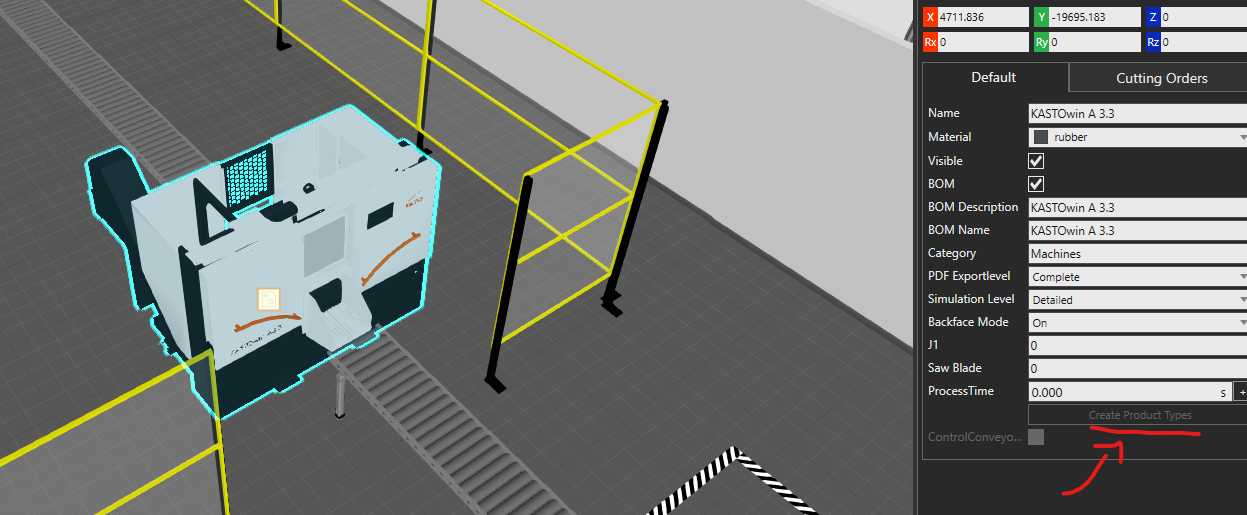
The machine, the product type is from :