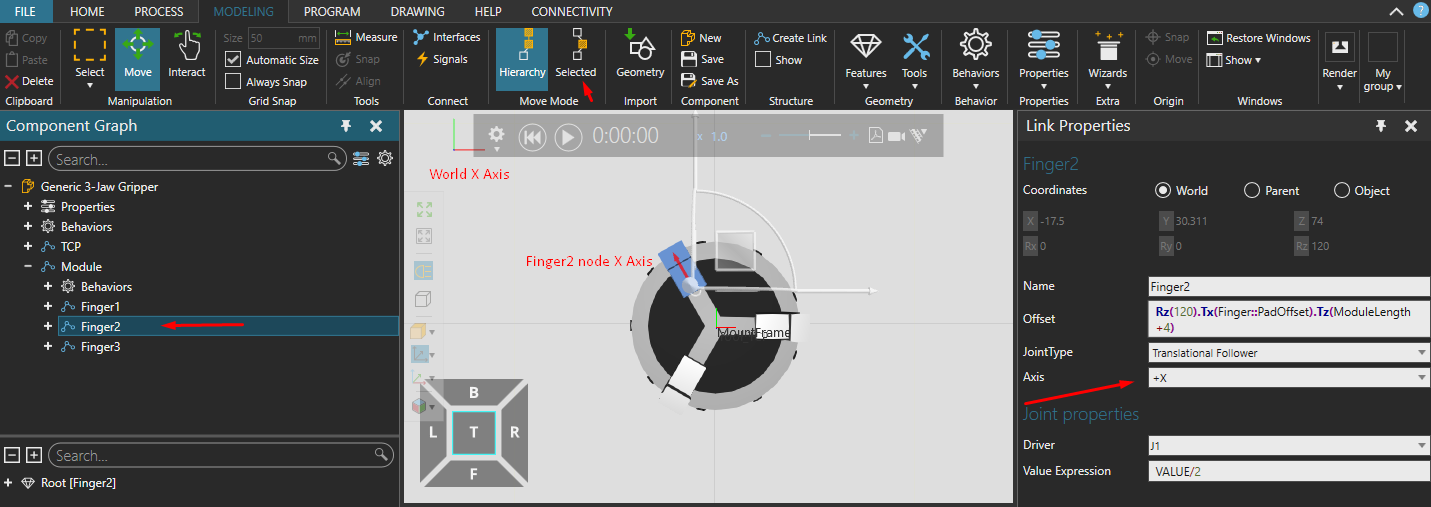
How do you get all the fingers of a 3-jaw gripper to actuate using the modelling feature? The first one is easy, as it is aligned with one of the axes. However, as the other two don’t line up, I’m unable to get them to follow the first one properly.
How do you get all the fingers of a 3-jaw gripper to actuate using the modelling feature? The first one is easy, as it is aligned with one of the axes. However, as the other two don’t line up, I’m unable to get them to follow the first one properly.