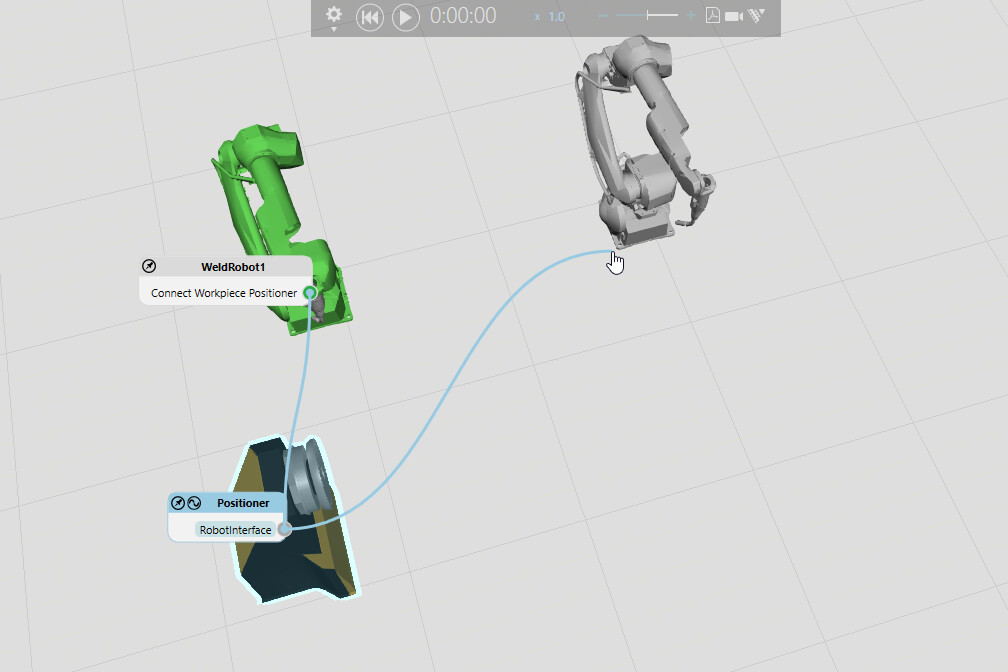
I have a weld cell with 2 fanuc robots and 1 positioner. All objects are directly from the eCat. The positioner will only allow 1 robot to be connected. I need both connected. Any ideas on how to accomplish this?
Weld Cell.vcmx (1.2 MB)
I have a weld cell with 2 fanuc robots and 1 positioner. All objects are directly from the eCat. The positioner will only allow 1 robot to be connected. I need both connected. Any ideas on how to accomplish this?
Hy,
and which one should control the positioner?
Regards
Feature
In the real world, 1 robot controller would control both arms and the positioner. In VC, I don’t know how it is supposed to be setup. I should be able to make a robot program in one of the robots and each position would have data for both arms and the positioner.
I got something to work. I went into the 2nd weld robot and setup the interfaces to match what the positioner interfaces were. Now, robot 1 sees robot 2 as a workpiece positioner. When a point is taught in weld robot 1, I see 7 external axis in the point data and when you move to the points, the motion is coordinated between both robots and positioner. I can’t believe this is the solution, there has to be an easier way. This setup is one of the most common setups in the automation world. Any feedback would be great.
Hy,
may your positioner need two interfaces?
Regards
Feature
Hello, have there been any further developments on this over the last ~year?
I have the same Fanuc dual arm and single positioner configuration in my VC model. I have learned how to connect the positioner to both robots (by setting positioner interface to “One to Many”).
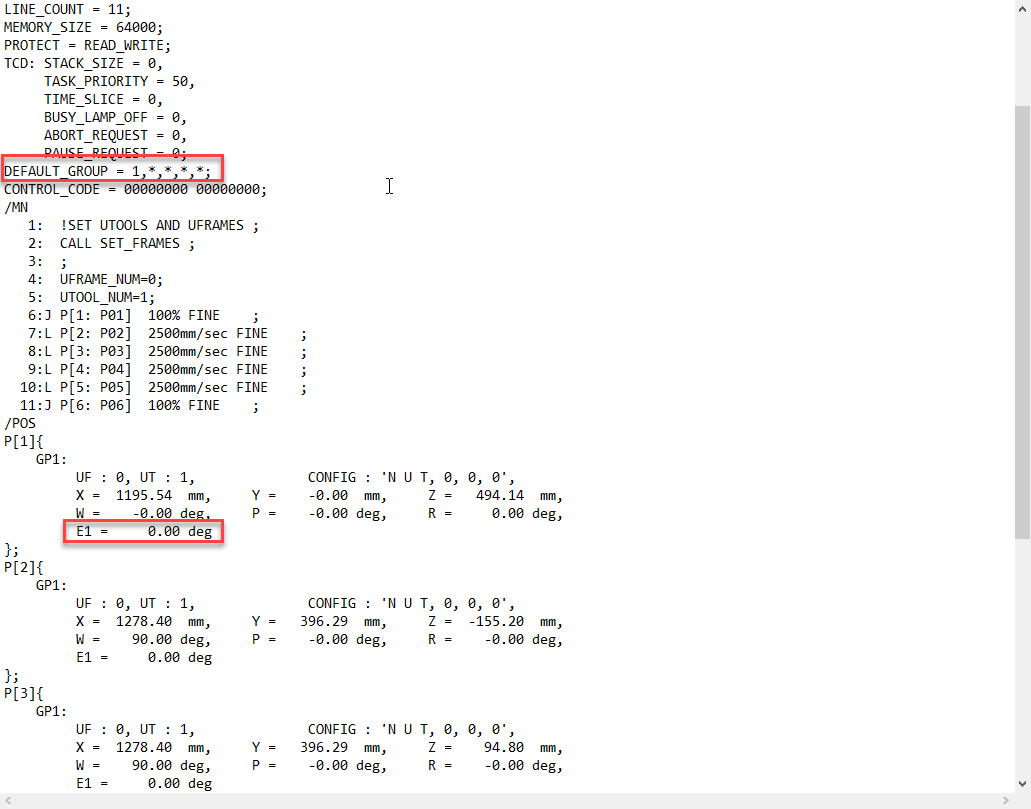
However, VC still treats each robot program separately and when I export either program (using “RobotPostProcessor” command), it only contains information for GP1 in the LS file. Nothing for the second arm in GP2 or the positioner in GP3. It does look like perhaps it is treating the positioner like an extended axis of the robot.
Any help would be appreciated.