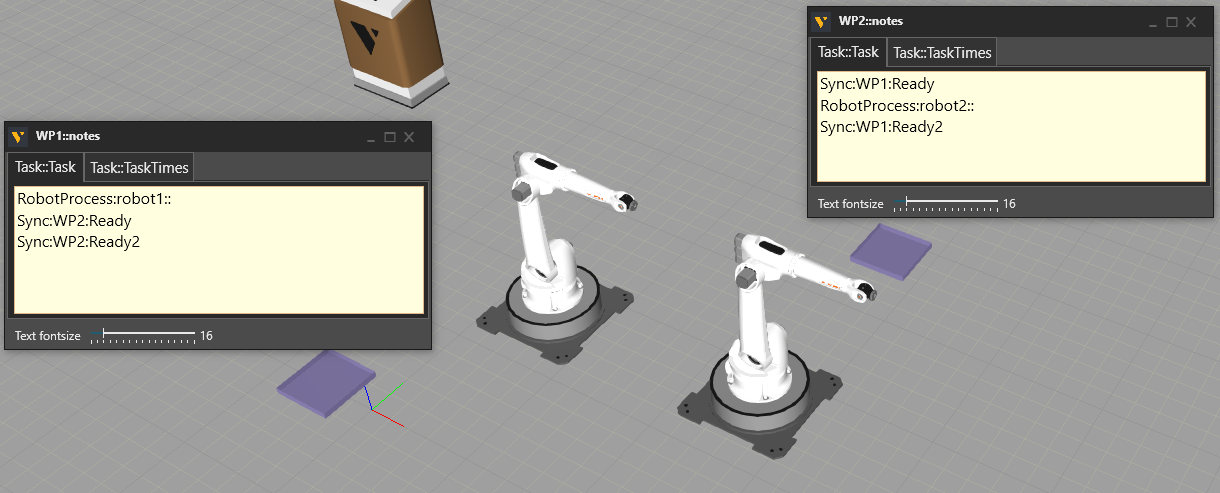
I found that the command of sync is effective between works process component. But it will report an error such as ““Works_TaskControl::SyncScript”, line 34, in someSynced”, when syncing with other robots.
So, is there anyway to model the Wors_TaskControl or Works process to solve it ?