Hi,
I’m trying to configure a safety configuration in kukasim 4.0.2 But it seems impossible.
The configuration is simple: just a protected space where robot can not go inside.
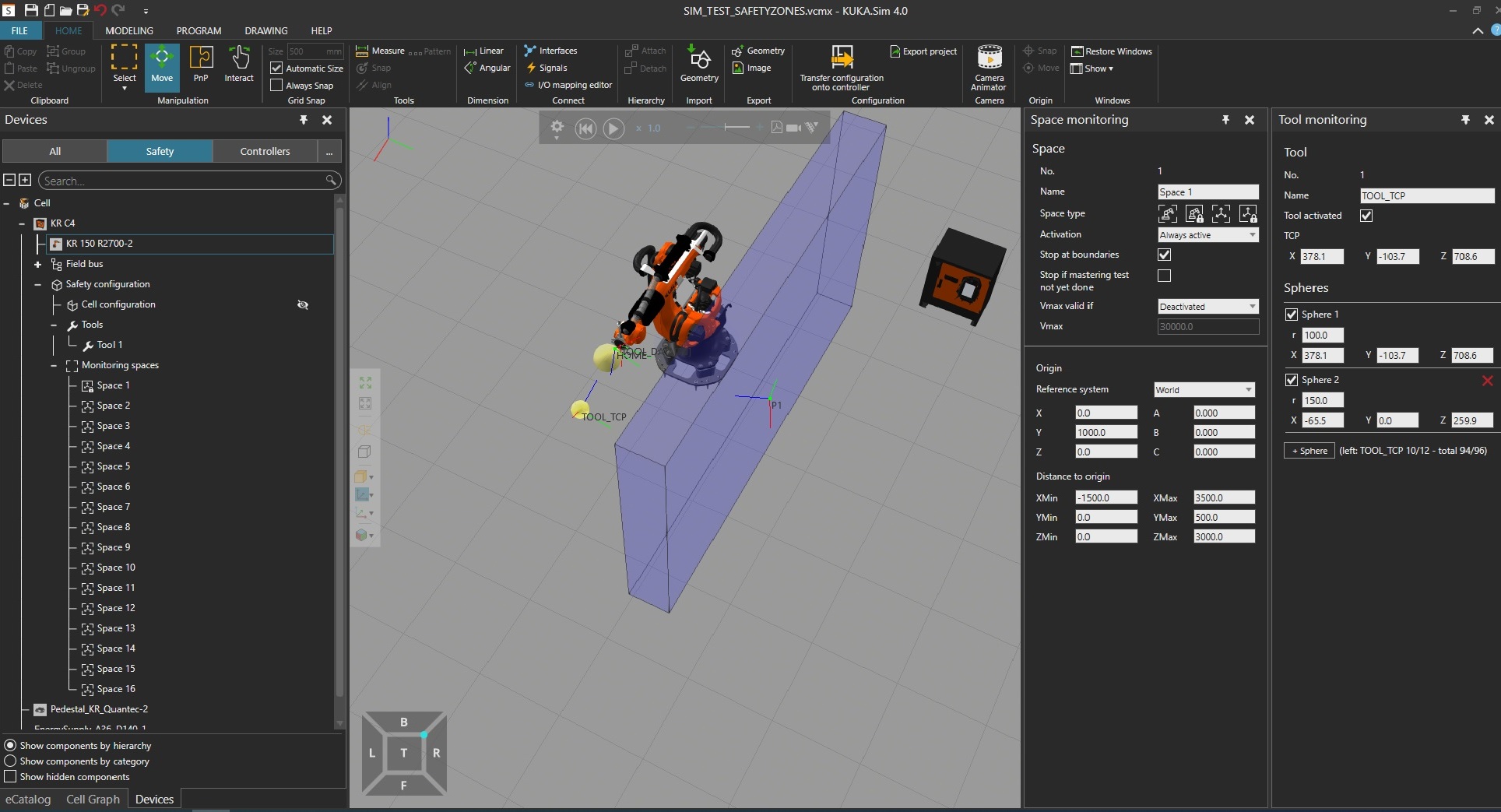
- I create a tool (TOOL_TCP), with the tcp and 2 spheres. I also activate the tool in that box.
- Then I create a protected space (Space 1), allways active and stop at boundaries.The dimensions are related to Reference system world.
- The cell configuration is big enough for have inside all the components.
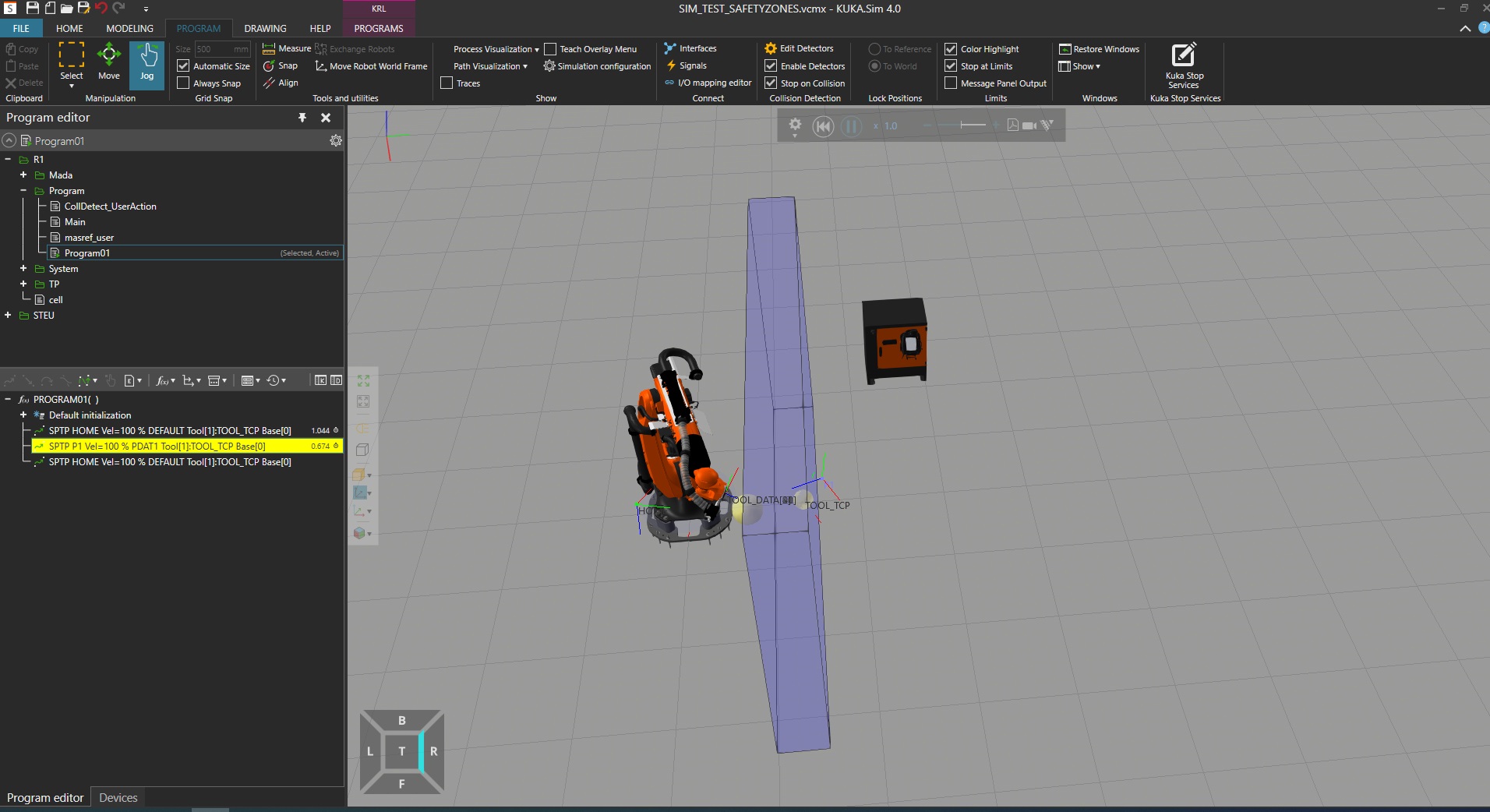
So, if I create a trajectory with a point P1 outside the protected space, when I run the program, the robot doesn’t stop. The robot goes inside and outside the protected space without stopping…
So, my question: how should i do to make the safety configuration work properly?
Am I missing some KS option?
thanks in advance.