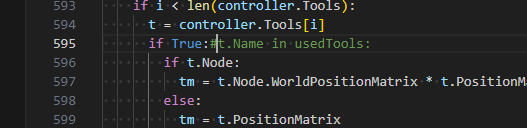
I don’t remember if I wrote that part of the translator and what my reasoning was for it to work like that. But sure it could probably be better. If and when we revisit Yaskawa I’ll have another look at the source with this in mind. For a hotfix you could try to modify “Yaskawa_JBI.py” source file on line 595 like this:
EDIT: Fixed the picture and its source code so that it’s valid python now
I’ve instaled addon and no “Post Process” button shows up on the Program ribbon tab.
I tried instalation (unpacking into directory) as written in readme, also tried install it with addon store, but all with same result.
I have VC premium 4.9 with floating license.
Thank you, the post-processor button is in its place.
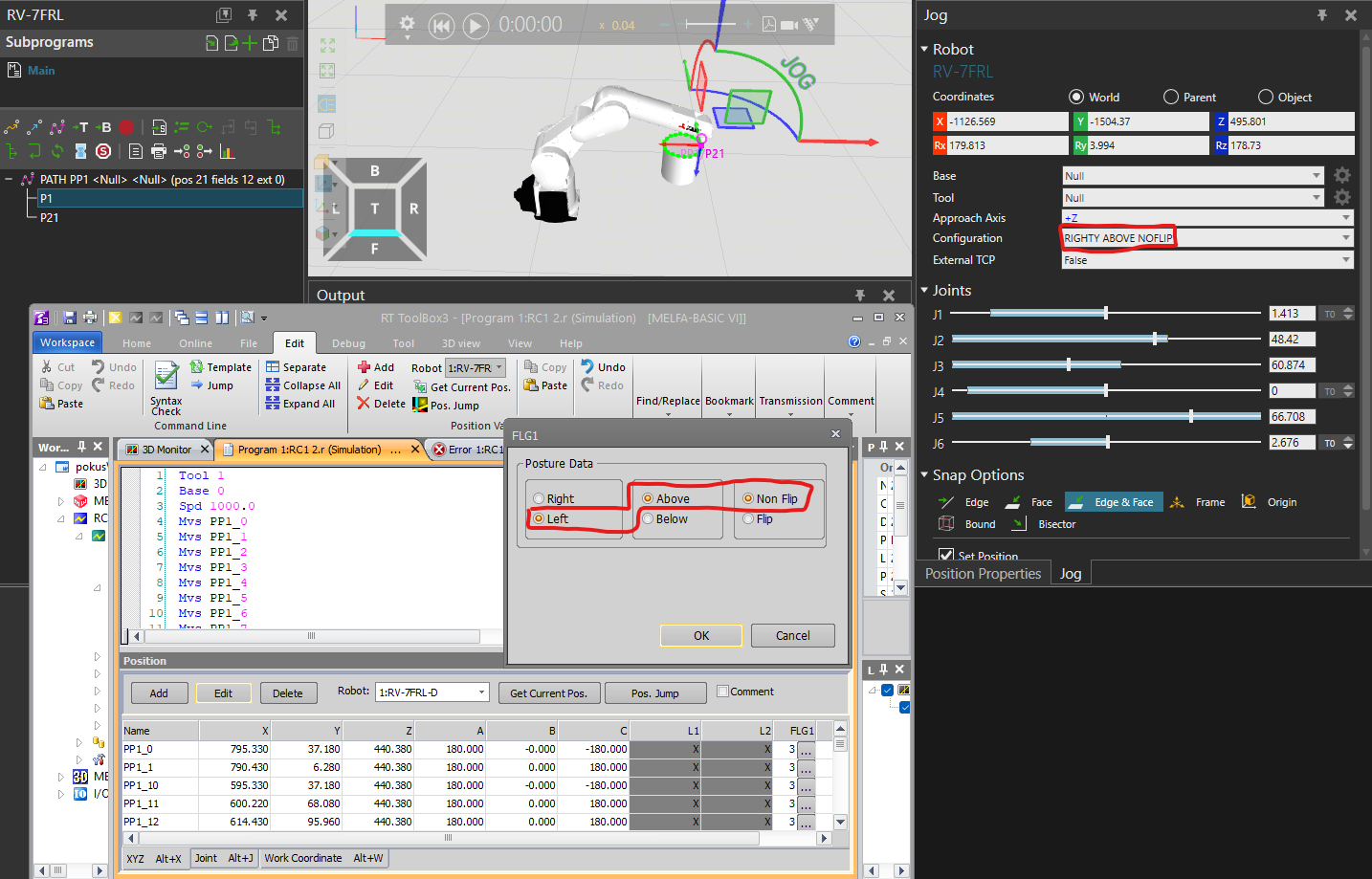
I don’t know if there is a hidden setting, but it looks like there is an error in the position variable processing for Mitsu robots.
Even though the VC configuration is Righty, Above, Noflip, the processor export it as 3, which in the RT toolbox translates to Left, Above, Non Flip.
That may be error in the translator. You could also try adding one PTP motion at the start as PTPs will set the configuration for linear motions following it. And path statements are usually translated as linear motions.
We no longer develop this post-processor add-on. All post-processor development is made for VC OLP products. So if you are using OLP products and would have need to use OLP for this brand please contact your sales representative. He can then then forward your case and see what would it take to add Dobot translators to OLP.