Hello,
I would like to know how to plug & play a lift for cobot with a guide rail ?
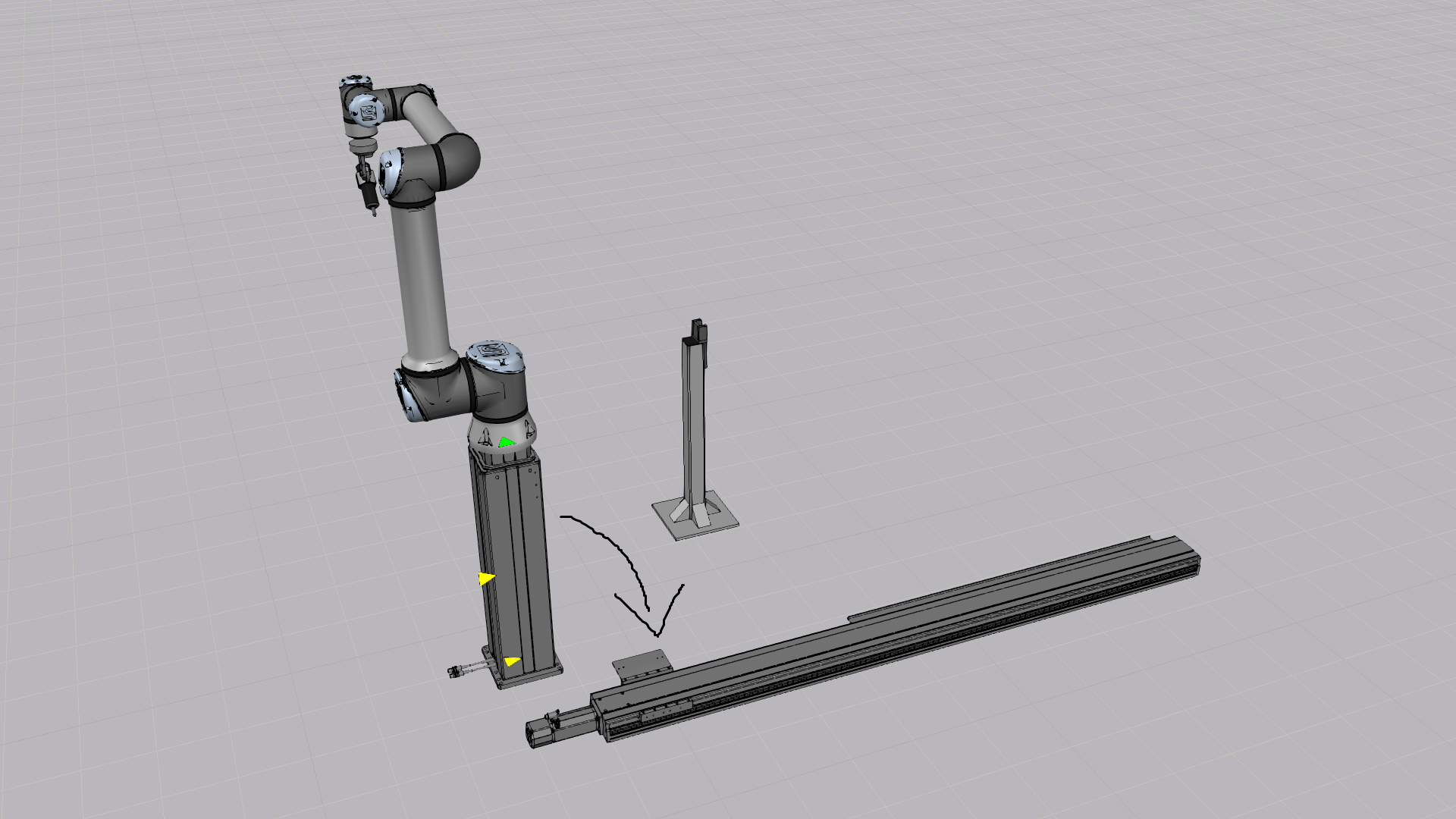
Attached is the photo!
Hello,
I would like to know how to plug & play a lift for cobot with a guide rail ?
Attached is the photo!
This is not possible unfortunately. VC cannot daisy chain joint export interfaces. That means that robot positioner chain must be modeled as one component. You cannot even have static pedestal between a track and robot but robot must be connected directly to track.
-k
And how should I do it as one component?
Waiting for your answear! Thanks!
You need access to modeling tab so Professional or Premium. Then copy geometries from one device to another and create links for the “extra” links. We don’t have a tutorial video for this kind of modeling task. Closest tutorial I can think of is about modeling workpiece positioner so you can pick up certain things from there:
-k
For me it doesn’t work. I want to do also a process there, with robot and lift moving on the track.
B.R.
Vlad
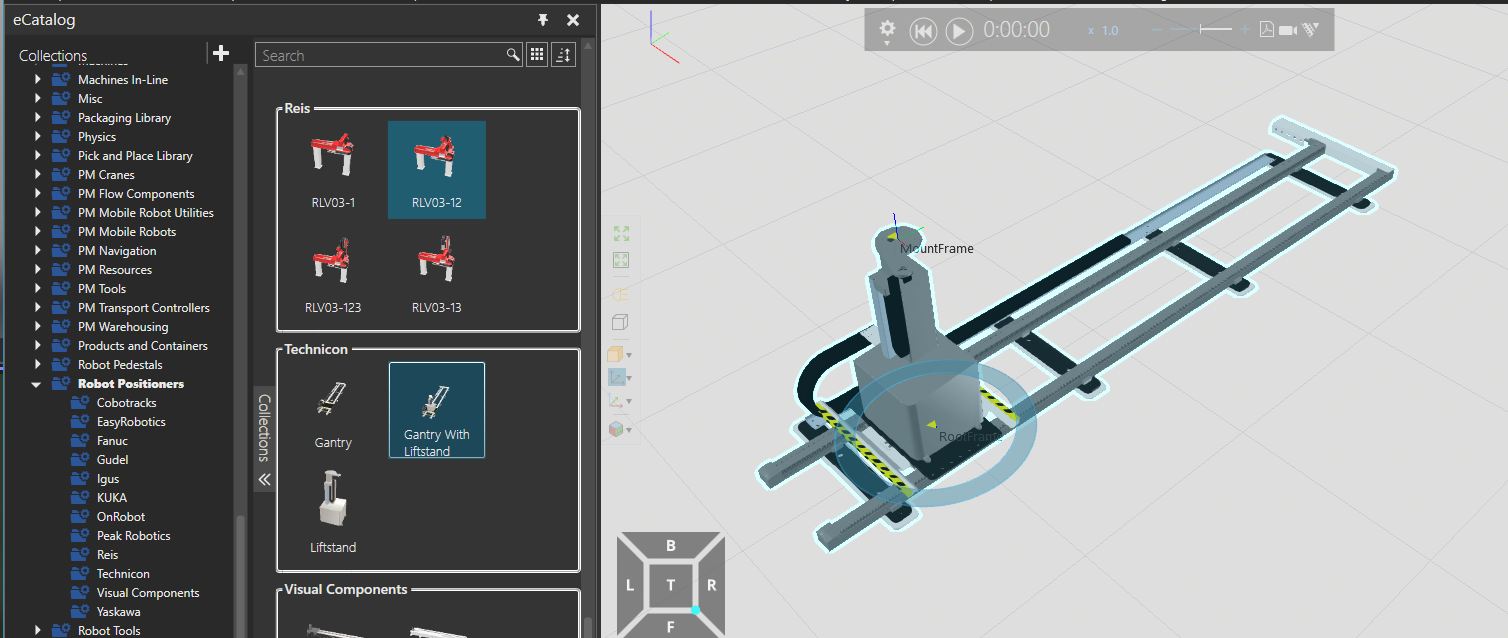
You could take a look how some eCat component is modeled and try to mimic that. For example Technicon has one component in 4.6 eCat with floortrack and lift axes:
-k
Here’s quick video on how to combine track and lift into one functional component. It’s not 100% perfect but should hit the key points:
Then you can test component and if it works save it as new component.
-k