Hy,
i have following problem: I update the limits of an robot over expression with properties and everything works fine.
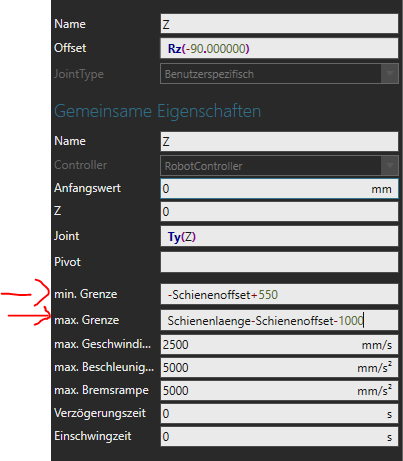
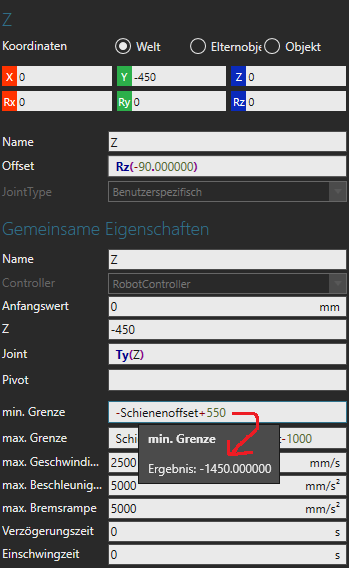
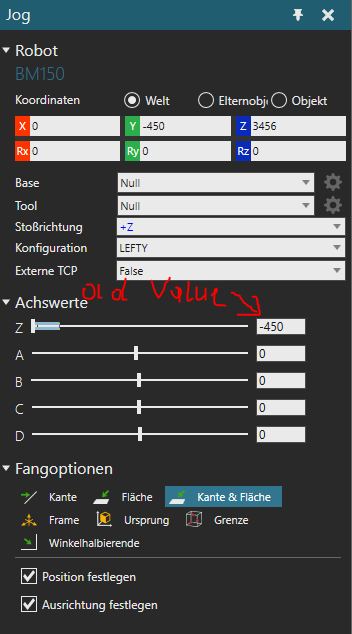
But then I jog the robot by hand the result of the updated expression gets ignored and shows the old value in modelling tab everything is fine with the limit of link…
Thx & Regards
Feature