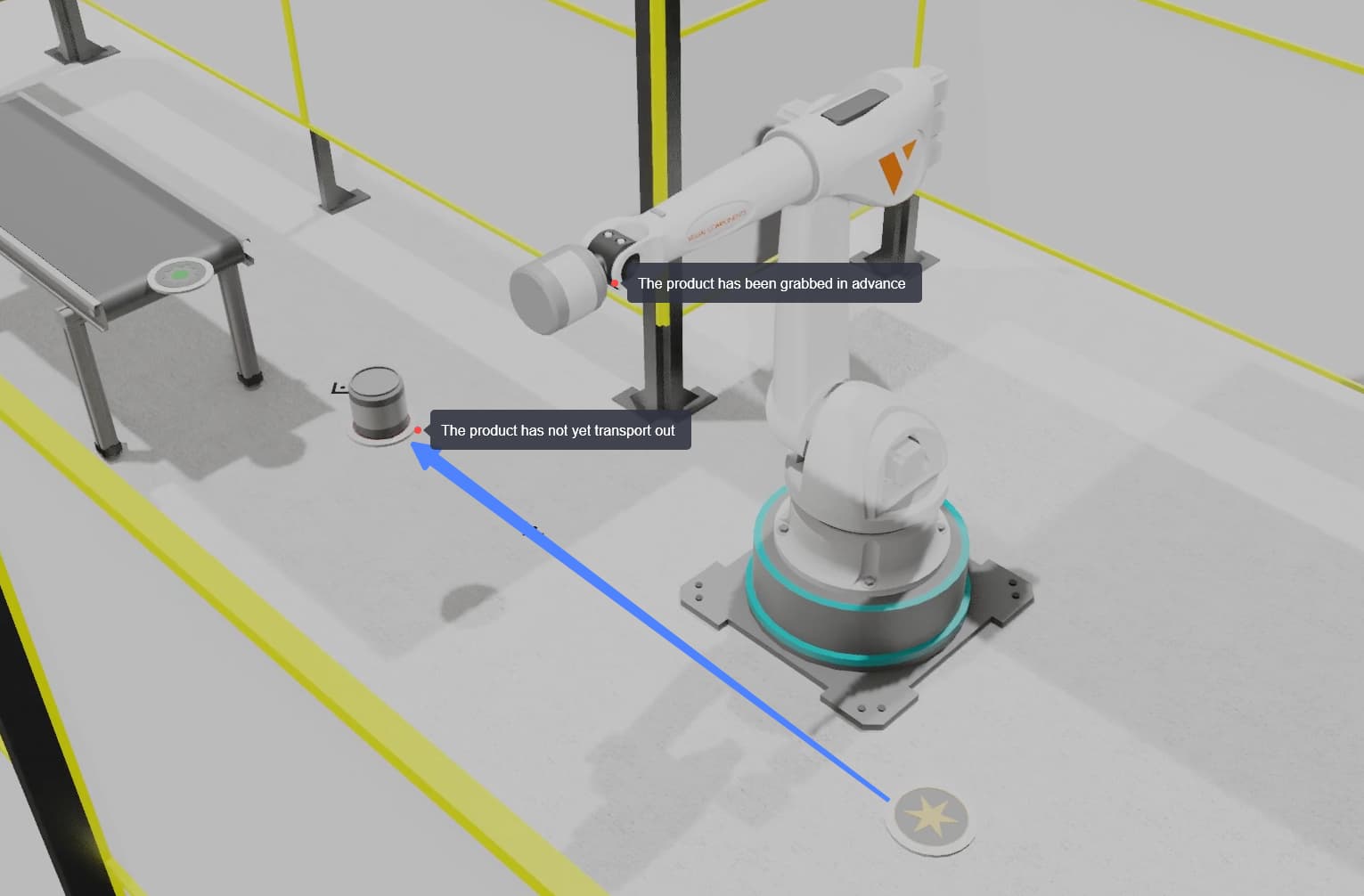
The usual material flow is to wait for the product to “transport out” before the “transport in” command is started. When the “transport in” command is started, the robot will start to grab the next product.
However, I need to make the robot grab the next product in advance before the previous product “transport out”, and then the robot puts the captured product on the process node after the previous product “transport out”
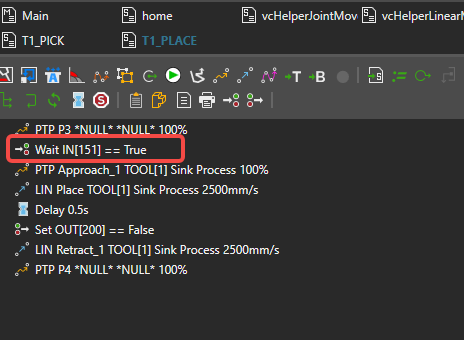
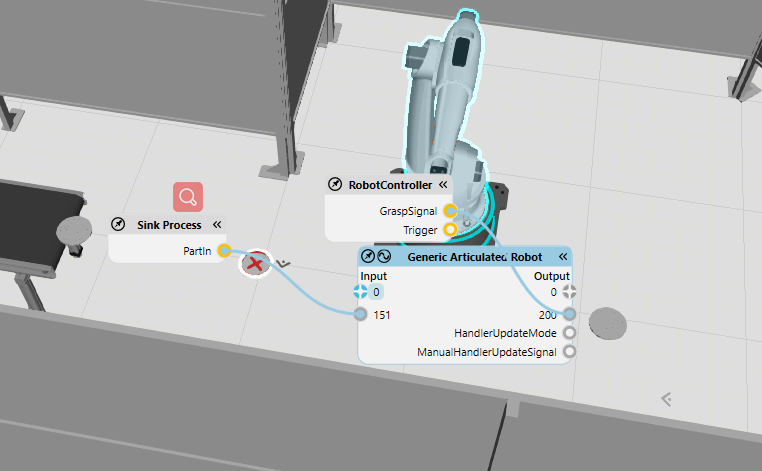
You can add a RunRobotRoutine before the transport out executes in your PM logic. Record a PICK routine and save it in robot program. Execute this PICK before the TransportOut.