I created an assembly and I would like to pick the white Boxes out of the racks. The problem is I want the robot to first transport out all the parts of the one rack and then pick out all parts of the second rack. At the moment the robot is picking parts of one rack and then of the other. I want one rack tho to be complelty transported out and then go on with the other rack. Is there a way how I can do that ?
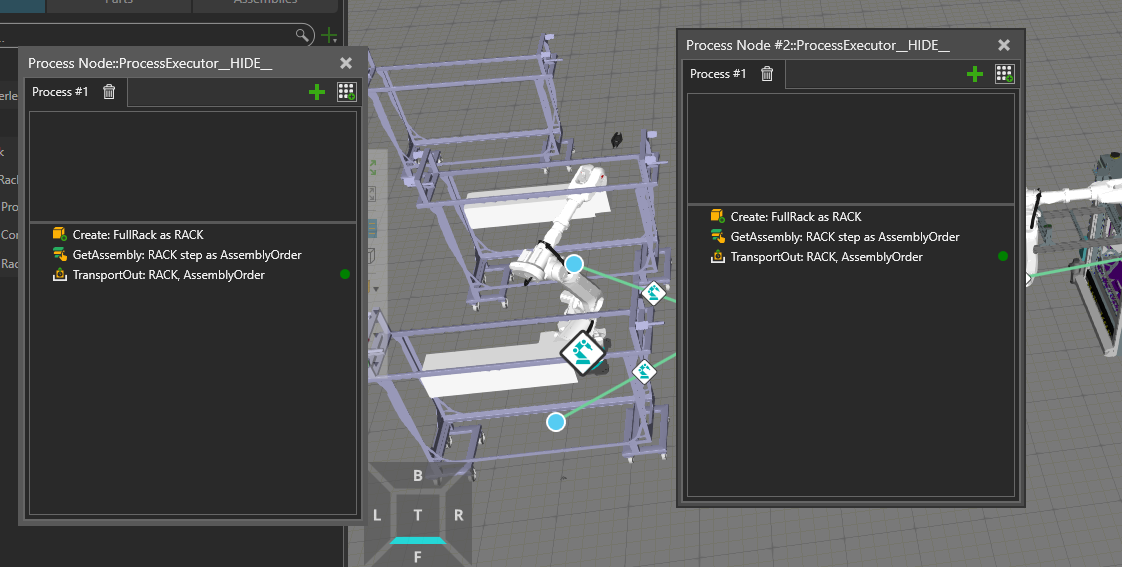
You could use e.g. SendSignal and WaitSignal to synchronize between the two “Process #1” implementations such that only one of them is executing the TransportOut statement at any given time.
There is a “Create signal” tool in Process tab → Helper Tools to create the necessary signal behavior.