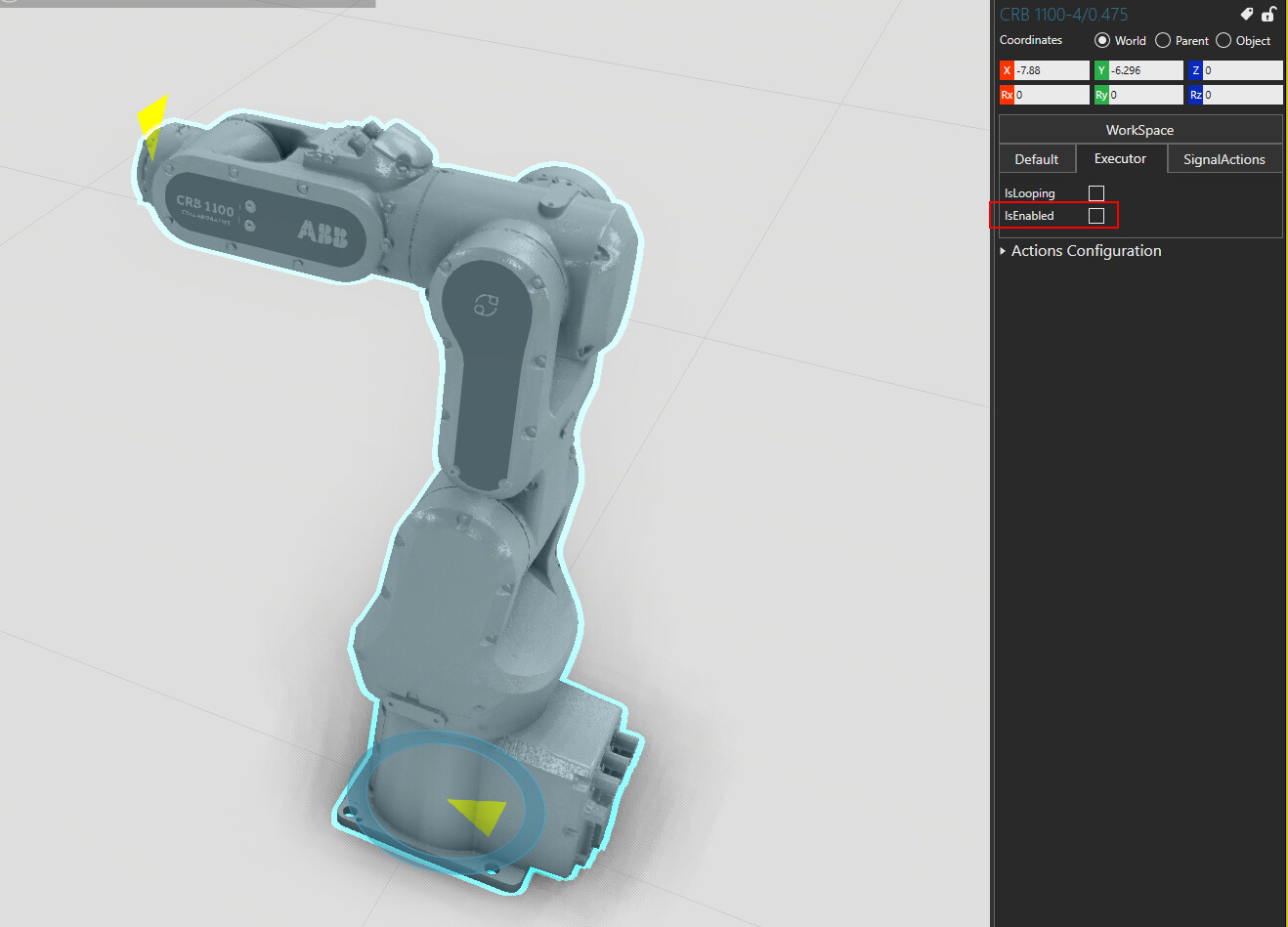
It could be that you haven’t disabled VC model’s executor (see the pic). If this is the case then the robot model gets controlled by two different sources (its own executor and connectivity connection).
-k