Good afternoon everyone,
I have a doubt. It is possible to import/export robot programs so it can be used in multiple simulations without needing to create them again?
Good afternoon everyone,
I have a doubt. It is possible to import/export robot programs so it can be used in multiple simulations without needing to create them again?
Other than saving a copy of the robot and reloading and exchanging it as needed, you could create modules for exporting and importing the robot program. You just have to decide how you want to format the program. I think someone already posted an example using XML…
I’m currently working on such an importer for abb and fanuc, but I’m still far from being done with it.
So far it is possible to import movements and "if"s ( not more than to or 3 at once).
As an advice for you, look at the exporter and try to “invert” it, so you have like a base structure.
Still, if anyone has any kind of adivce, everything is helpful.
Thank you
Try creating a dictionary that uses the RAPID syntax, for example ABB program, and then map it to a dictionary for creating equivalents in VC. If you are using 4.1 then you have a lot more wiggle room because you can use VC Comment statements and modify them with a Statement Executor to do whatever you want. For example, if there is a RAPID statement that does not match any default VC statement, then a VC Comment statement could be extended/modified to match the action(s) of the RAPID statement.
I see you very familiar with the software of VC, I now have a ABB robot program files (mod), the robot’s motion, linear motion program to import, I tried to not have a problem, but there have a lot of logic, pickle involve the input and output, I now want to import the application in VC, how should i do?
regards
Try using uploader found on this forum.
Or don’t import the program at all and instead connect RobotStudio to VC and use as external controller for robot.
Can you explain to me how these work? I’m a rookie, thanks very much.
Download the uploader, and then unzip and add its contents to the My Commands folder of your Visual Components documents. Restart VC, and then the uploader will show in the ribbon for Program tab. Use the uploader to import your ABB program.
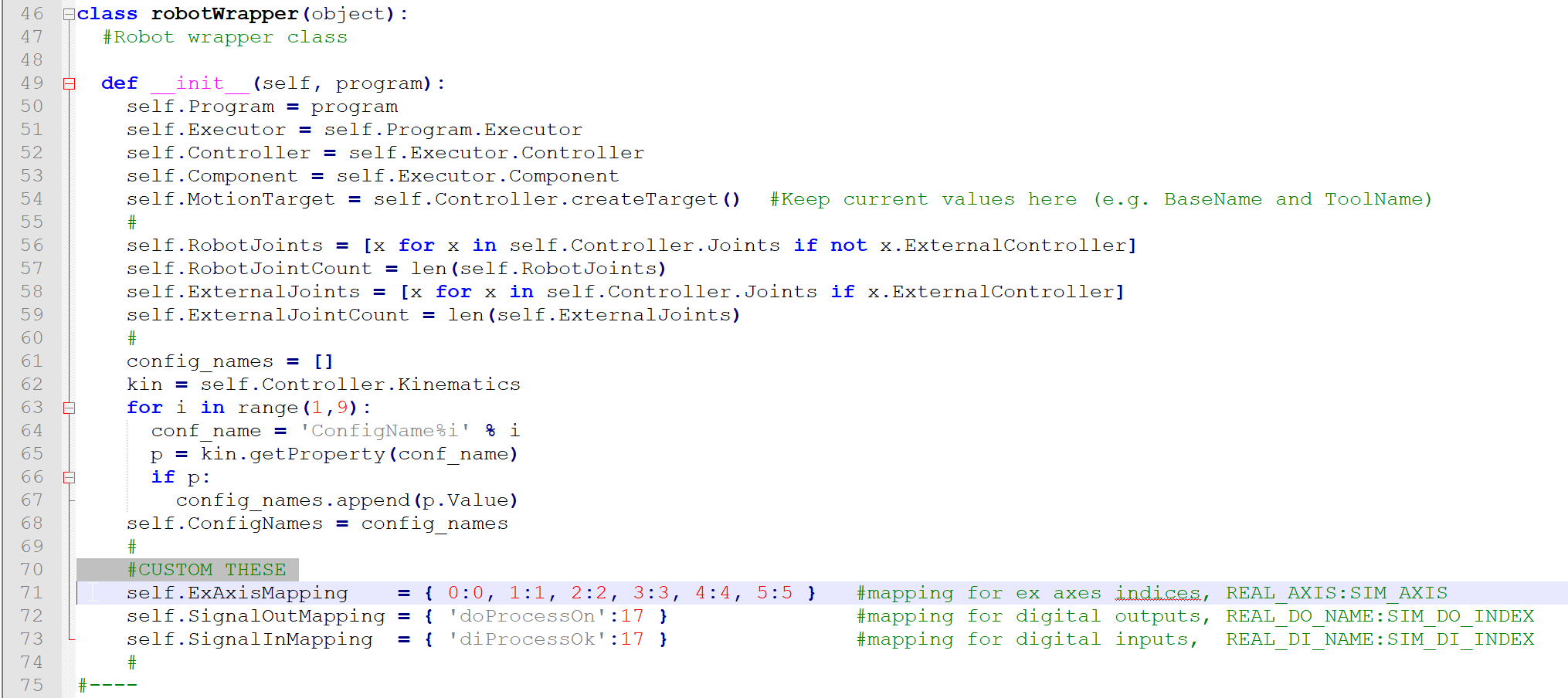
I have added this function to the software, but I import I/O(DO DI) signal, I have a problem, please help me solve it!
Regards
Probably better if you contact support with your layout and give overview of your IO in ABB RobotStudio. My understanding is you have to modify the uploader’s Python files for mapping to work, otherwise you need to remap everything/make changes after import. I know next to little about RobotStudio, unfortunately, and my trial license expired last week.
“uploader’s Python” How can i find this file?
Where can I find “Statement Executor”?As you said, there is a RAPID statement that does not match any default VC statement.How can i do? My version is Visual Components Premium 4.1.
regards
Sorry, I meant to write “Statement Handler”, which is a Python Process Handler behavior that can be used to control the execution of statements in a vcExecutor object.
That feature was added in VC 4.1, so you should be able to do it. Here is document explaining how to use the Statement Handler. Which RAPID statement is it?
Modify Execution of Robot Statements.docx (920.0 KB)
I can’t thank you enough。I couldn’t have done it without you.
So you got it working?